I just wanted to know if it’s possible, that’s all. I do have a problem with the script, for some reason my GPS keeps timing out and it doesn’t want to find a location, while it did using the script that you can find on arduino guides.
I’ve been messing around with this code for a while now. It gives no errors and it says that the packets are being queued. I’ve yet to recieve the payload in the TTN backend. But I’ve made some progress. I can’t seem to find any errors, maybe some of you can find it?
// MIT License
// https://github.com/gonzalocasas/arduino-uno-dragino-lorawan/blob/master/LICENSE
// Based on examples from https://github.com/matthijskooijman/arduino-lmic
// Copyright (c) 2015 Thomas Telkamp and Matthijs Kooijman
//DEBUGGING
#define DEBUG
#define DEBU//G_XL
//Includes
#include <lmic.h>
#include <hal/hal.h>
#include <SPI.h>
#include <SoftwareSerial.h>
#include <TinyGPS.h>
//LoRaWAN credentials
#ifdef CREDENTIALS
static const u1_t NWKSKEY[16] = NWKSKEY1;
static const u1_t APPSKEY[16] = APPSKEY1;
static const u4_t DEVADDR = DEVADDR1;
#else
static const u1_t NWKSKEY[16] = {xxx, 0x3F, 0x0A, xxxx 0xF7, 0xEE,xxxx3, 0xAC, 0xC2, 0x9E, 0x38, 0x29, 0x25, 0x29, 0x88, 0x30 };
static const u1_t APPSKEY[16] = { 0x93, xxxx, 0xC9, xxxx, 0x15, xxx, 0xF8, xxxxB, 0x54, 0x3A, 0x8E, 0x7F, 0x93, 0x61, 0xD9, 0x30 };
static const u4_t DEVADDR = 0xxxxxx89E;
#endif
uint8_t mydata[14]; //Extra bytes as buffer to play with
const unsigned message_size =11;
// These callbacks are only used in over-the-air activation, so they are
// left empty here (we cannot leave them out completely unless
// DISABLE_JOIN is set in config.h, otherwise the linker will complain).
void os_getArtEui (u1_t* buf) { }
void os_getDevEui (u1_t* buf) { }
void os_getDevKey (u1_t* buf) { }
//Sendjob
static osjob_t sendjob;
// Schedule TX every this many seconds (might become longer due to duty
// cycle limitations).
const unsigned TX_INTERVAL = 250;
dr_t LMIC_DR_sequence[] = {DR_SF7, DR_SF10, DR_SF7, DR_SF7, DR_SF7, DR_SF7, DR_SF7, DR_SF9, DR_SF7, DR_SF7, DR_SF7, DR_SF7};
int LMIC_DR_sequence_count = 12;
int LMIC_DR_sequence_index = 0;
// Pin mapping Dragino Shield
const lmic_pinmap lmic_pins = {
.nss = 10,
.rxtx = LMIC_UNUSED_PIN,
.rst = 9,
.dio = {2, 6, 7},
};
// TinyGPS object
TinyGPS gps;
//SoftwareSerial pin mapping
SoftwareSerial ss(3, 2); // RX, TX Arduino RX, TX --> GPS TXD, RXD
void onEvent (ev_t ev) {
Serial.print(os_getTime());
Serial.print(": ");
//Error catching
switch(ev) {
case EV_SCAN_TIMEOUT:
Serial.println(F("EV_SCAN_TIMEOUT"));
break;
case EV_BEACON_FOUND:
Serial.println(F("EV_BEACON_FOUND"));
break;
case EV_BEACON_MISSED:
Serial.println(F("EV_BEACON_MISSED"));
break;
case EV_BEACON_TRACKED:
Serial.println(F("EV_BEACON_TRACKED"));
break;
case EV_JOINING:
Serial.println(F("EV_JOINING"));
break;
case EV_JOINED:
Serial.println(F("EV_JOINED"));
//Disable link check validarion (Auto enabled during join, but not supported by TTN);
LMIC_setLinkCheckMode(0);
break;
case EV_RFU1:
Serial.println(F("EV_RFU1"));
break;
case EV_JOIN_FAILED:
Serial.println(F("EV_JOIN_FAILED"));
break;
case EV_REJOIN_FAILED:
Serial.println(F("EV_REJOIN_FAILED"));
break;
break;
case EV_TXCOMPLETE:
Serial.println(F("EV_TXCOMPLETE (Includes waiting for RX windows"));
if (LMIC.txrxFlags & TXRX_ACK) { // No { ???
Serial.println(F("Received ack"));
}
if (LMIC.dataLen) {
Serial.println(F("Recieved "));
Serial.println(LMIC.dataLen);
Serial.println(F(" bytes of payload"));
}
// Schedule next transmission
os_setTimedCallback(&sendjob, os_getTime()+sec2osticks(TX_INTERVAL), do_send);
break;
case EV_LOST_TSYNC:
Serial.println(F("EV_LOST_TSYNC"));
break;
case EV_RESET:
Serial.println(F("EV_RESET"));
break;
case EV_RXCOMPLETE:
//Recieved data in ping slot
Serial.println(F("EV_RX_COMPLETE"));
break;
case EV_LINK_DEAD:
Serial.println(F("EV_LINK_DEAD"));
break;
case EV_LINK_ALIVE:
Serial.println(F("EV_LINK_ALIVE"));
break;
default:
//If error != debug then display default value
Serial.println(F("What the fuck is going on"));
break;
}
}
// do_send call is scheduled in event handler
void do_send(osjob_t* j){
// starting version == martijn's version
Serial.println("\ndo_send was called");
// Check if there is not a current TX/RX job running
if (LMIC.opmode & OP_TXRXPEND) {
Serial.println(F("OP_TXRXPEND, not sending"));
} else {
// Prepare upstream data transmission at the next possible time.
// Debug for sending
#ifdef DEBUG
Serial.println(" expected CA DA F? 83 5E 9? 0 ?? ?? " );
Serial.println(" dummy 7F FF FF 7F FF FF 0 0 0 " );
#endif
Serial.print(" mydata[] = [");
Serial.print( mydata[0], HEX );
Serial.print(" ");
Serial.print( mydata[1], HEX );
Serial.print(" ");
Serial.print( mydata[2], HEX );
Serial.print(" ");
Serial.print( mydata[3], HEX );
Serial.print(" ");
Serial.print( mydata[4], HEX );
Serial.print(" ");
Serial.print( mydata[5], HEX );
Serial.print(" ");
Serial.print( mydata[6], HEX );
if (message_size>7) Serial.print(" ");
if (message_size>7) Serial.print( mydata[7], HEX );
if (message_size>8) Serial.print(" ");
if (message_size>8) Serial.print( mydata[8], HEX );
if (message_size>9) Serial.print(" / ");
if (message_size>9) Serial.print( mydata[9], HEX );
if (message_size>10) Serial.print(" ");
if (message_size>10) Serial.print( mydata[10], HEX );
Serial.print("] ");
Serial.print("DR [ ");
Serial.print( LMIC_DR_sequence_index );
Serial.print(" ] = ");
Serial.print( LMIC_DR_sequence[LMIC_DR_sequence_index] );
if ( LMIC_DR_sequence[LMIC_DR_sequence_index]==DR_SF7) Serial.print(" DR_SF7 ");
if ( LMIC_DR_sequence[LMIC_DR_sequence_index]==DR_SF8) Serial.print(" DR_SF8 ");
if ( LMIC_DR_sequence[LMIC_DR_sequence_index]==DR_SF9) Serial.print(" DR_SF9 ");
if ( LMIC_DR_sequence[LMIC_DR_sequence_index]==DR_SF10) Serial.print(" DR_SF10 ");
if ( LMIC_DR_sequence[LMIC_DR_sequence_index]==DR_SF11) Serial.print(" DR_SF11 ");
if ( LMIC_DR_sequence[LMIC_DR_sequence_index]==DR_SF12) Serial.print(" DR_SF12 ");
// Set data rate and transmit power for uplink (note: txpow seems to be ignored by the library
// for the ttn mapper always use SF7. For other use cases, SF12 can be used, however that will require 60 mins quiet time,
// according to TTN rules.
LMIC_setDrTxpow(LMIC_DR_sequence[LMIC_DR_sequence_index],14); // Set data rate
LMIC_DR_sequence_index = LMIC_DR_sequence_index + 1;
if (LMIC_DR_sequence_index >= LMIC_DR_sequence_count) {
LMIC_DR_sequence_index=0;
}
// Send that shit
LMIC_setTxData2(1, mydata, message_size, 0);
Serial.println(" - packet queued");
}
// Next TX is scheduled after TX_COMPLETE event.
}
void lmic_init() {
os_init();
//Reset MAC state
LMIC_reset();
//EU config
#if defined(CFG_eu868)
// Set up the channels for TTN
// Corresponds to most default EU gateways
// Good for debugging, doesn't overload frequencies
LMIC_setupChannel(0, 868100000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(1, 868300000, DR_RANGE_MAP(DR_SF12, DR_SF7B), BAND_CENTI); // g-band
LMIC_setupChannel(2, 868500000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(3, 867100000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(4, 867300000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(5, 867500000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(6, 867700000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(7, 867900000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(8, 868800000, DR_RANGE_MAP(DR_FSK, DR_FSK), BAND_MILLI); // g2-band
#elif defined(CFG_us915)
//USA frequency config
LMIC_selectSubBand(1);
#endif
LMIC_setLinkCheckMode(0); //Enable/disable link check validation
// TTN uses SF9 for its RX2 window
LMIC.dn2Dr = DR_SF9;
//Set data rate and transmit power for uplink
LMIC_setDrTxpow(DR_SF7,14);
}
void setup() {
Serial.begin(115200);
Serial.println(F("Starting..."));
//Load the send buffer with dummy location. 0,0 is recognized as dummy by TTN and will therefor not be displayed.
put_gpsvalues_into_sendbuffer( 0,0,0,0);
Serial.println();
Serial.println();
Serial.println("Starting GPS LoRa transmission");
Serial.print("Simple TinyGPS library v. "); Serial.println(TinyGPS::library_version());
Serial.println();
//GPS Serial
ss.begin(9600); //Software serial with GPS module.
#ifdef VCC_ENABLE
//For sleep mode
pinMode(VCC_ENABLE, OUTPUT);
digitalWrite(VCC_ENABLE, HIGH);
delay(1000);
#endif
lmic_init();
//Start job delayed so system can look for GPS first
os_setTimedCallback(&sendjob, os_getTime()+sec2osticks(5), do_send);
// Set static session parameters.
LMIC_setSession (0x1, DEVADDR, NWKSKEY, APPSKEY);
}
void loop() {
// process the serial feed from GPS module
Serial.println(" ");
//Serial.println("Read GPS... ");
char c;
unsigned long start = millis();
do
{
while (ss.available())
{
char c = ss.read();
#ifdef DEBUG_XL
Serial.write(c); // uncomment this line if you want to see the GPS data flowing
#endif
if (gps.encode(c)) // Did a new valid sentence come in?
process_gps_values();
}
} while (millis() - start < 3000); // if too high a value then system wil delay scheduled jobs and the send sequence will take too long
os_runloop_once(); // system picks up scheduled jobs
}
void process_gps_values()
{
// retrieve some usefull values from GPS library
float flat, flon, alt;
unsigned long age;
int hdopNumber;
gps.f_get_position(&flat, &flon, &age); // lat -90.0 .. 90.0 as a 4 byte float, lon -180 .. 180 as a 4 byte float, age in 1/1000 seconds as a 4 byte unsigned long
alt = gps.f_altitude(); // signed float altitude in meters
hdopNumber = gps.hdop(); // int 100ths of a meter
// check if possibly invalid
bool GPS_values_are_valid = true;
if (flat == TinyGPS::GPS_INVALID_F_ANGLE) GPS_values_are_valid = false;
if (flon == TinyGPS::GPS_INVALID_F_ANGLE) GPS_values_are_valid = false;
if (hdopNumber == TinyGPS::GPS_INVALID_HDOP) GPS_values_are_valid = false;
if (age == TinyGPS::GPS_INVALID_AGE) GPS_values_are_valid = false;
if (alt == TinyGPS::GPS_INVALID_F_ALTITUDE) GPS_values_are_valid = false; // if alt, hdop remain giving errors, possibly the GPS character read misses every start few characters of every feed. Solution: make the code lighter so it returns quicker to character read. Or process a bit of buffer while doing other actions, see TinyGPS example.
// if valid, put into buffer
if (GPS_values_are_valid) put_gpsvalues_into_sendbuffer( flat, flon, alt, hdopNumber);
// after init, sendbuffer holds 0,0 lovation; after first fix it will retain the last valid location
Serial.print(".");
//show me something
#ifdef DEBUG
// keep some values out as seems to take performance and/or make for code to miss GPS sentences
unsigned long chars = 0;
//unsigned short sentences = 0, failed = 0;
//uint32_t sat;
//gps.stats(&chars, &sentences, &failed);
//sat = gps.satellites();
Serial.println();
Serial.print("Data: ");
if (GPS_values_are_valid) Serial.print("(valid) ");
if (!GPS_values_are_valid) Serial.print("(** INVALID");
if (flat == TinyGPS::GPS_INVALID_F_ANGLE) {Serial.print(" lat="); Serial.print(flat);}
if (flon == TinyGPS::GPS_INVALID_F_ANGLE) {Serial.print(" lon="); Serial.print(flon);}
if (hdopNumber == TinyGPS::GPS_INVALID_HDOP) {Serial.print(" hdop="); Serial.print(hdopNumber);}
if (age == TinyGPS::GPS_INVALID_AGE) {Serial.print(" age="); Serial.print(age);}
if (alt == TinyGPS::GPS_INVALID_F_ALTITUDE) {Serial.print(" alt="); Serial.print(alt);}
if (!GPS_values_are_valid) Serial.print(" **) ");
Serial.print(" LAT, LON=");
Serial.print( flat, 6);
Serial.print(", ");
Serial.print(flon, 6); // 52.632656, 4.738389
Serial.print(" hdop=");
Serial.print( hdopNumber);
Serial.print(" alt=");
Serial.print( alt );
Serial.print(" AGE=");
Serial.print(age);
//Serial.print(" SAT=");
//Serial.print( sat);
// Serial.print(" CHARS=");
// Serial.print(chars);
//Serial.print(" SENT=");
//Serial.print(sentences);
//Serial.print(" ERR=");
//Serial.print(failed);
Serial.println("");
#endif
#ifdef DEBUG_XL
if (chars == 0)
Serial.println("** No characters from GPS: check wiring **");
else if (age > 5000)
Serial.println("Warning: possible stale GPS data (age over 5 seconds)");
else
Serial.println("GPS Data is fresh (age less than 5 seconds)");
Serial.print("For TTN message LatitudeBinary, LongitudeBinary, altitudeGps, accuracy: ");
// Serial.print( LatitudeBinary, HEX);
// Serial.print(", ");
// Serial.print( LongitudeBinary, HEX );
// Serial.print(", ");
// Serial.print( altitudeGps, HEX );
// Serial.print(", ");
// Serial.println( accuracy, HEX );
Serial.println("expected CA DA F. 83 5E 9. 0 .. .. " );
Serial.println(" dummy 7F FF FF 7F FF FF 0 0 0 " );
Serial.print( "mydata[] = ");
Serial.print( mydata[0], HEX );
Serial.print(" ");
Serial.print( mydata[1], HEX );
Serial.print(" ");
Serial.print( mydata[2], HEX );
Serial.print(" ");
Serial.print( mydata[3], HEX );
Serial.print(" ");
Serial.print( mydata[4], HEX );
Serial.print(" ");
Serial.print( mydata[5], HEX );
Serial.print(" ");
Serial.print( mydata[6], HEX );
if (message_size>6) Serial.print(" ");
if (message_size>6) Serial.print( mydata[7], HEX );
if (message_size>7) Serial.print(" ");
if (message_size>7) Serial.print( mydata[8], HEX );
if (message_size>8) Serial.print(" / ");
if (message_size>8) Serial.print( mydata[9], HEX );
if (message_size>9) Serial.print(" ");
if (message_size>9) Serial.print( mydata[10], HEX );
Serial.println("]");
#endif
}
void put_gpsvalues_into_sendbuffer(float flat, float flon, float alt, int hdopNumber)
{
uint32_t LatitudeBinary = ((flat + 90) / 180) * 16777215;
uint32_t LongitudeBinary = ((flon + 180) / 360) * 16777215;
uint16_t altitudeGps = alt; // altitudeGps in meters, alt from tinyGPS is float in meters
if (alt<0) altitudeGps=0; // unsigned int wil not allow negative values and warps them to huge number, needs to be zero'ed
// uint8_t accuracy = hdopNumber*10; // needs to be /10 instead of *10 as per example JP
uint8_t accuracy = hdopNumber/10; // from TinyGPS horizontal dilution of precision in 100ths, TinyGPSplus seems the same in 100ths as per MNEMA string
mydata[0] = ( LatitudeBinary >> 16 ) & 0xFF;
mydata[1] = ( LatitudeBinary >> 8 ) & 0xFF;
mydata[2] = LatitudeBinary & 0xFF;
mydata[3] = ( LongitudeBinary >> 16 ) & 0xFF;
mydata[4] = ( LongitudeBinary >> 8 ) & 0xFF;
mydata[5] = LongitudeBinary & 0xFF;
// altitudeGps in meters into unsigned int
mydata[6] = ( altitudeGps >> 8 ) & 0xFF;
mydata[7] = altitudeGps & 0xFF;
// hdop in tenths of meter
mydata[8] = accuracy & 0xFF;
mydata[9] = 0; // fill up next bytes in buffer, just for play. As-if null terminated string.
mydata[10] = 0xFF; // dummy filler byte
}
1 Like
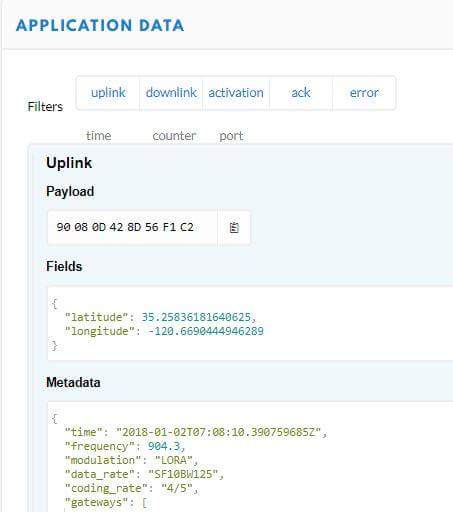
UPDATE:
I got it working! I didn’t declare the channels so I commented them out, just uses 868 as default right now. I get lat and lng in the backend using SF12.
Would SF7 be a better idea?
1 Like
Of course. Quit hogging our gateways god dammit! 
ADR would be best, then the network server will set the appropriate SF, but I don’t know if LMIC supports this.
1 Like
UPDATE:
It’s working, but it outputs bullshit. See below
Okay so here is my script:
//DEBUGGING
#define DEBUG
#define DEBUG_XL
//Includes
#include <lmic.h>
#include <hal/hal.h>
#include <SPI.h>
#include <SoftwareSerial.h>
#include <TinyGPS.h>
//LoRaWAN credentials
#ifdef CREDENTIALS
static const u1_t NWKSKEY[16] = NWKSKEY1;
static const u1_t APPSKEY[16] = APPSKEY1;
static const u4_t DEVADDR = DEVADDR1;
#else
static const u1_t NWKSKEY[16] = { 0x0C, 0x3F, 0x0A, 0x47, 0xF7, 0xEE, 0x23, 0xAC, 0xC2, 0x9E, 0x38, 0x29, 0x25, 0x29, 0x88, 0x30 };
static const u1_t APPSKEY[16] = { 0x93, 0x35, 0xC9, 0x49, 0x15, 0xC1, 0xF8, 0x2B, 0x54, 0x3A, 0x8E, 0x7F, 0x93, 0x61, 0xD9, 0x30 };
static const u4_t DEVADDR = 0x2601189E;
#endif
uint8_t mydata[14]; //Extra bytes as buffer to play with
const unsigned message_size =11;
// These callbacks are only used in over-the-air activation, so they are
// left empty here (we cannot leave them out completely unless
// DISABLE_JOIN is set in config.h, otherwise the linker will complain).
void os_getArtEui (u1_t* buf) { }
void os_getDevEui (u1_t* buf) { }
void os_getDevKey (u1_t* buf) { }
//Sendjob
static osjob_t sendjob;
// Schedule TX every this many seconds (might become longer due to duty
// cycle limitations).
const unsigned TX_INTERVAL = 250;
dr_t LMIC_DR_sequence[] = {DR_SF12, DR_SF10, DR_SF7, DR_SF7, DR_SF7, DR_SF7, DR_SF7, DR_SF9, DR_SF7, DR_SF7, DR_SF7, DR_SF7};
int LMIC_DR_sequence_count = 12;
int LMIC_DR_sequence_index = 0;
// Pin mapping Dragino Shield
const lmic_pinmap lmic_pins = {
.nss = 10,
.rxtx = LMIC_UNUSED_PIN,
.rst = 9,
.dio = {2, 6, 7},
};
// TinyGPS object
TinyGPS gps;
//SoftwareSerial pin mapping
SoftwareSerial ss(3, 2); // RX, TX Arduino RX, TX --> GPS TXD, RXD
void onEvent (ev_t ev) {
Serial.print(os_getTime());
Serial.print(": ");
//Error catching
switch(ev) {
case EV_SCAN_TIMEOUT:
Serial.println(F("EV_SCAN_TIMEOUT"));
break;
case EV_BEACON_FOUND:
Serial.println(F("EV_BEACON_FOUND"));
break;
case EV_BEACON_MISSED:
Serial.println(F("EV_BEACON_MISSED"));
break;
case EV_BEACON_TRACKED:
Serial.println(F("EV_BEACON_TRACKED"));
break;
case EV_JOINING:
Serial.println(F("EV_JOINING"));
break;
case EV_JOINED:
Serial.println(F("EV_JOINED"));
//Disable link check validarion (Auto enabled during join, but not supported by TTN);
LMIC_setLinkCheckMode(0);
break;
case EV_RFU1:
Serial.println(F("EV_RFU1"));
break;
case EV_JOIN_FAILED:
Serial.println(F("EV_JOIN_FAILED"));
break;
case EV_REJOIN_FAILED:
Serial.println(F("EV_REJOIN_FAILED"));
break;
break;
case EV_TXCOMPLETE:
Serial.println(F("EV_TXCOMPLETE (includes waiting for RX windows)"));
if (LMIC.txrxFlags & TXRX_ACK)
Serial.println(F("Received ack"));
if (LMIC.dataLen) {
Serial.println(F("Received "));
Serial.println(LMIC.dataLen);
Serial.println(F(" bytes of payload"));
}
// Schedule next transmission
os_setTimedCallback(&sendjob, os_getTime()+sec2osticks(TX_INTERVAL), do_send);
break;
case EV_LOST_TSYNC:
Serial.println(F("EV_LOST_TSYNC"));
break;
case EV_RESET:
Serial.println(F("EV_RESET"));
break;
case EV_RXCOMPLETE:
//Recieved data in ping slot
Serial.println(F("EV_RX_COMPLETE"));
break;
case EV_LINK_DEAD:
Serial.println(F("EV_LINK_DEAD"));
break;
case EV_LINK_ALIVE:
Serial.println(F("EV_LINK_ALIVE"));
break;
default:
//If error != debug then display default value
Serial.println(F("What the fuck is going on"));
break;
}
}
// do_send call is scheduled in event handler
void do_send(osjob_t* j){
// starting version == martijn's version
Serial.println("\ndo_send was called");
// Check if there is not a current TX/RX job running
if (LMIC.opmode & OP_TXRXPEND) {
Serial.println(F("OP_TXRXPEND, not sending"));
} else {
// Prepare upstream data transmission at the next possible time.
// Debug for sending
#ifdef DEBUG
Serial.println(" expected CA DA F? 83 5E 9? 0 ?? ?? " );
Serial.println(" dummy 7F FF FF 7F FF FF 0 0 0 " );
#endif
Serial.print(" mydata[] = [");
Serial.print( mydata[0], HEX );
Serial.print(" ");
Serial.print( mydata[1], HEX );
Serial.print(" ");
Serial.print( mydata[2], HEX );
Serial.print(" ");
Serial.print( mydata[3], HEX );
Serial.print(" ");
Serial.print( mydata[4], HEX );
Serial.print(" ");
Serial.print( mydata[5], HEX );
Serial.print(" ");
Serial.print( mydata[6], HEX );
if (message_size>7) Serial.print(" ");
if (message_size>7) Serial.print( mydata[7], HEX );
if (message_size>8) Serial.print(" ");
if (message_size>8) Serial.print( mydata[8], HEX );
if (message_size>9) Serial.print(" / ");
if (message_size>9) Serial.print( mydata[9], HEX );
if (message_size>10) Serial.print(" ");
if (message_size>10) Serial.print( mydata[10], HEX );
Serial.print("] ");
Serial.print("DR [ ");
Serial.print( LMIC_DR_sequence_index );
Serial.print(" ] = ");
Serial.print( LMIC_DR_sequence[LMIC_DR_sequence_index] );
if ( LMIC_DR_sequence[LMIC_DR_sequence_index]==DR_SF7) Serial.print(" DR_SF7 ");
if ( LMIC_DR_sequence[LMIC_DR_sequence_index]==DR_SF8) Serial.print(" DR_SF8 ");
if ( LMIC_DR_sequence[LMIC_DR_sequence_index]==DR_SF9) Serial.print(" DR_SF9 ");
if ( LMIC_DR_sequence[LMIC_DR_sequence_index]==DR_SF10) Serial.print(" DR_SF10 ");
if ( LMIC_DR_sequence[LMIC_DR_sequence_index]==DR_SF11) Serial.print(" DR_SF11 ");
if ( LMIC_DR_sequence[LMIC_DR_sequence_index]==DR_SF12) Serial.print(" DR_SF12 ");
Serial.print("Data =");
Serial.println(mydata[0]);
Serial.println(mydata[1]);
Serial.println(mydata[2]);
Serial.println(mydata[3]);
Serial.println(mydata[4]);
Serial.println(mydata[5]);
Serial.println(mydata[6]);
Serial.println(mydata[7]);
Serial.println(mydata[8]);
Serial.println(mydata[9]);
Serial.println(mydata[10]);
// Set data rate and transmit power for uplink (note: txpow seems to be ignored by the library
// for the ttn mapper always use SF7. For other use cases, SF12 can be used, however that will require 60 mins quiet time,
// according to TTN rules.
LMIC_setDrTxpow(LMIC_DR_sequence[LMIC_DR_sequence_index],14); // Set data rate
LMIC_DR_sequence_index = LMIC_DR_sequence_index + 1;
if (LMIC_DR_sequence_index >= LMIC_DR_sequence_count) {
LMIC_DR_sequence_index=0;
}
// Send that shit
LMIC_setTxData2(1, mydata, message_size, 0);
Serial.println(" - packet queued");
}
// Next TX is scheduled after TX_COMPLETE event.
}
void lmic_init() {
os_init();
//Reset MAC state
LMIC_reset();
// //EU config
// #if defined(CFG_eu868)
// // Set up the channels for TTN
// // Corresponds to most default EU gateways
// // Good for debugging, doesn't overload frequencies
// LMIC_setupChannel(0, 868100000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
// LMIC_setupChannel(1, 868300000, DR_RANGE_MAP(DR_SF12, DR_SF7B), BAND_CENTI); // g-band
// LMIC_setupChannel(2, 868500000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
// LMIC_setupChannel(3, 867100000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
// LMIC_setupChannel(4, 867300000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
// LMIC_setupChannel(5, 867500000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
// LMIC_setupChannel(6, 867700000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
// LMIC_setupChannel(7, 867900000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
// LMIC_setupChannel(8, 868800000, DR_RANGE_MAP(DR_FSK, DR_FSK), BAND_MILLI); // g2-band
// #elif defined(CFG_us915)
// //USA frequency config
// LMIC_selectSubBand(1);
// #endif
LMIC_setLinkCheckMode(0); //Enable/disable link check validation
// TTN uses SF9 for its RX2 window
LMIC.dn2Dr = DR_SF9;
//Set data rate and transmit power for uplink
LMIC_setDrTxpow(DR_SF12,14);
}
void setup() {
Serial.begin(115200);
Serial.println(F("Starting..."));
//Load the send buffer with dummy location. 0,0 is recognized as dummy by TTN and will therefor not be displayed.
put_gpsvalues_into_sendbuffer( 0,0,0,0);
Serial.println();
Serial.println();
Serial.println("Starting GPS LoRa transmission");
Serial.print("Simple TinyGPS library v. "); Serial.println(TinyGPS::library_version());
Serial.println();
//GPS Serial
ss.begin(9600); //Software serial with GPS module.
lmic_init();
//Start job delayed so system can look for GPS first
os_setTimedCallback(&sendjob, os_getTime()+sec2osticks(20), do_send);
// Set static session parameters.
LMIC_setSession (0x1, DEVADDR, NWKSKEY, APPSKEY);
}
void loop() {
// process the serial feed from GPS module
Serial.println(" ");
Serial.println("Read GPS... ");
char c;
unsigned long start = millis();
do
{
while (ss.available())
{
char c = ss.read();
#ifdef DEBUG_XL
Serial.write(c); // uncomment this line if you want to see the GPS data flowing
#endif
if (gps.encode(c)) // Did a new valid sentence come in?
process_gps_values();
}
} while (millis() - start < 3000); // if too high a value then system wil delay scheduled jobs and the send sequence will take too long
os_runloop_once(); // system picks up scheduled jobs
}
void process_gps_values()
{
// retrieve some usefull values from GPS library
float flat, flon, alt;
unsigned long age;
int hdopNumber;
gps.f_get_position(&flat, &flon, &age); // lat -90.0 .. 90.0 as a 4 byte float, lon -180 .. 180 as a 4 byte float, age in 1/1000 seconds as a 4 byte unsigned long
alt = gps.f_altitude(); // signed float altitude in meters
hdopNumber = gps.hdop(); // int 100ths of a meter
// check if possibly invalid
bool GPS_values_are_valid = true;
if (flat == TinyGPS::GPS_INVALID_F_ANGLE) GPS_values_are_valid = false;
if (flon == TinyGPS::GPS_INVALID_F_ANGLE) GPS_values_are_valid = false;
if (hdopNumber == TinyGPS::GPS_INVALID_HDOP) GPS_values_are_valid = false;
if (age == TinyGPS::GPS_INVALID_AGE) GPS_values_are_valid = false;
if (alt == TinyGPS::GPS_INVALID_F_ALTITUDE) GPS_values_are_valid = false; // if alt, hdop remain giving errors, possibly the GPS character read misses every start few characters of every feed. Solution: make the code lighter so it returns quicker to character read. Or process a bit of buffer while doing other actions, see TinyGPS example.
// if valid, put into buffer
if (GPS_values_are_valid) put_gpsvalues_into_sendbuffer( flat, flon, alt, hdopNumber);
// after init, sendbuffer holds 0,0 lovation; after first fix it will retain the last valid location
Serial.print(".");
//show me something
#ifdef DEBUG
// keep some values out as seems to take performance and/or make for code to miss GPS sentences
unsigned long chars = 0;
//unsigned short sentences = 0, failed = 0;
//uint32_t sat;
//gps.stats(&chars, &sentences, &failed);
//sat = gps.satellites();
Serial.println();
Serial.print("Data: ");
if (GPS_values_are_valid) Serial.print("(valid) ");
if (!GPS_values_are_valid) Serial.print("(** INVALID");
if (flat == TinyGPS::GPS_INVALID_F_ANGLE) {Serial.print(" lat="); Serial.print(flat);}
if (flon == TinyGPS::GPS_INVALID_F_ANGLE) {Serial.print(" lon="); Serial.print(flon);}
if (hdopNumber == TinyGPS::GPS_INVALID_HDOP) {Serial.print(" hdop="); Serial.print(hdopNumber);}
if (age == TinyGPS::GPS_INVALID_AGE) {Serial.print(" age="); Serial.print(age);}
if (alt == TinyGPS::GPS_INVALID_F_ALTITUDE) {Serial.print(" alt="); Serial.print(alt);}
if (!GPS_values_are_valid) Serial.print(" **) ");
Serial.print(" LAT, LON=");
Serial.print( flat, 6);
Serial.print(", ");
Serial.print(flon, 6); // 52.632656, 4.738389
Serial.print(" hdop=");
Serial.print( hdopNumber);
Serial.print(" alt=");
Serial.print( alt );
Serial.print(" AGE=");
Serial.print(age);
//Serial.print(" SAT=");
//Serial.print( sat);
// Serial.print(" CHARS=");
// Serial.print(chars);
//Serial.print(" SENT=");
//Serial.print(sentences);
//Serial.print(" ERR=");
//Serial.print(failed);
Serial.println("");
#endif
#ifdef DEBUG_XL
if (chars == 0)
Serial.println("** No characters from GPS: check wiring **");
else if (age > 5000)
Serial.println("Warning: possible stale GPS data (age over 5 seconds)");
else
Serial.println("GPS Data is fresh (age less than 5 seconds)");
Serial.print("For TTN message LatitudeBinary, LongitudeBinary, altitudeGps, accuracy: ");
Serial.print( LatitudeBinary, HEX);
Serial.print(", ");
Serial.print( LongitudeBinary, HEX );
Serial.print(", ");
Serial.print( altitudeGps, HEX );
Serial.print(", ");
Serial.println( accuracy, HEX );
Serial.println("expected CA DA F. 83 5E 9. 0 .. .. " );
Serial.println(" dummy 7F FF FF 7F FF FF 0 0 0 " );
Serial.print( "mydata[] = ");
Serial.print( mydata[0], HEX );
Serial.print(" ");
Serial.print( mydata[1], HEX );
Serial.print(" ");
Serial.print( mydata[2], HEX );
Serial.print(" ");
Serial.print( mydata[3], HEX );
Serial.print(" ");
Serial.print( mydata[4], HEX );
Serial.print(" ");
Serial.print( mydata[5], HEX );
Serial.print(" ");
Serial.print( mydata[6], HEX );
if (message_size>6) Serial.print(" ");
if (message_size>6) Serial.print( mydata[7], HEX );
if (message_size>7) Serial.print(" ");
if (message_size>7) Serial.print( mydata[8], HEX );
if (message_size>8) Serial.print(" / ");
if (message_size>8) Serial.print( mydata[9], HEX );
if (message_size>9) Serial.print(" ");
if (message_size>9) Serial.print( mydata[10], HEX );
Serial.println("]");
#endif
}
void put_gpsvalues_into_sendbuffer(float flat, float flon, float alt, int hdopNumber)
{
uint32_t LatitudeBinary = ((flat + 90) / 180) * 16777215;
uint32_t LongitudeBinary = ((flon + 180) / 360) * 16777215;
uint16_t altitudeGps = alt; // altitudeGps in meters, alt from tinyGPS is float in meters
if (alt<0) altitudeGps=0; // unsigned int wil not allow negative values and warps them to huge number, needs to be zero'ed
// uint8_t accuracy = hdopNumber*10; // needs to be /10 instead of *10 as per example JP
uint8_t accuracy = hdopNumber/10; // from TinyGPS horizontal dilution of precision in 100ths, TinyGPSplus seems the same in 100ths as per MNEMA string
mydata[0] = ( LatitudeBinary >> 16 ) & 0xFF;
mydata[1] = ( LatitudeBinary >> 8 ) & 0xFF;
mydata[2] = LatitudeBinary & 0xFF;
mydata[3] = ( LongitudeBinary >> 16 ) & 0xFF;
mydata[4] = ( LongitudeBinary >> 8 ) & 0xFF;
mydata[5] = LongitudeBinary & 0xFF;
// altitudeGps in meters into unsigned int
mydata[6] = ( altitudeGps >> 8 ) & 0xFF;
mydata[7] = altitudeGps & 0xFF;
// hdop in tenths of meter
mydata[8] = accuracy & 0xFF;
mydata[9] = 0; // fill up next bytes in buffer, just for play. As-if null terminated string.
mydata[10] = 0xFF; // dummy filler byte
}
Whem I’m outside the lat/lng output in the arduino serial monitor is correct. It also puts the output in a HEX format for ttn to support. But once I convert it back into readable text it outputs someting like this:
CAFC49849B8800000F00FF
wich translates into:
ÊüIÿ
I don’t get it, the console looks all good but the output makes no sense at all.
1 Like
HI Nidaros. How’s this project progressing? Any updates on Solar powered GPS trackers?
1 Like
Hi there, I have a prototype working but not on solar sadly. I’ts currently on usb
oh and i also got the decoding part working, if i can find it ill post below. Give me a sec
Here is what I used for my decorder. This was like 4 months ago so please don’t ask me questions 
function Decoder (bytes) {
var _lat = ((bytes[0] << 16) + (bytes[1] << 8) + bytes[2]) / 16777215.0 * 180.0 - 90;
var _lng = ((bytes[3] << 16) + (bytes[4] << 8) + bytes[5]) / 16777215.0 * 360.0 - 180;
var _alt = (bytes[6] << 8) + bytes[7];
var _acc = bytes[8] / 10.0;
var _VCC = bytes[9] / 50;
var _tempCPU = bytes[10] -100;
var _time_to_fix_bin = bytes[11];
var _time_to_fix;
if (_time_to_fix_bin>=218) { _time_to_fix = 60*60+(_time_to_fix_bin-218)*600 }
else if (_time_to_fix_bin>=168) { _time_to_fix = 10*60+(_time_to_fix_bin-168)*60 }
else if (_time_to_fix_bin>=60) { _time_to_fix = 60+(_time_to_fix_bin-60)*5 }
else {_time_to_fix = _time_to_fix_bin }
// 0..60 sec at 1 sec interval <==> values 0 .. 60
// 1..10 min at 5 sec interval <==> values 60 .. 168
// 10..60 min at 1 min interval <==> values 168 .. 218
// 1..7 hour at 10 min interval <==> values 218 ..254; 255 means "more than 7 hours"
return {
gps_lat: _lat,
gps_lng: _lng,
gps_alt: _alt,
gps_prec: _acc,
arduino_VCC: _VCC,
arduino_temp: _tempCPU,
time_to_fix: _time_to_fix,
};
}
1 Like
Thanks for the update 
1 Like
For mapping or range test. I am building Arudino mega + lora shield + adafruit ultimate gps v3 … Please correct me if I am wrong. Many thanks
GPS >> arduino Shield pin mapping…
vin >>vin
Gnd >> gnd
Tx >> rx (0)
Rx >> tx (1)
Config with ABP :
#include <lmic.h>
#include <hal/hal.h>
#include <SPI.h>
#include <TinyGPS.h>
TinyGPS gps;
…
GPS got fixed in 30 second to 1 min… however, only 0000000000 delivered as a payload.
Compiling the code has no error.
isn’t the GPS 3v3 logic level ? ( and the mega uart 5v)
Thanks for prompt reply. I powered mega by USB 5v. and GPS breakout board by mega VIN. Like this UNO examplw wiring @https://learn.adafruit.com/adafruit-ultimate-gps/arduino-wiring. Please tell me how should I wire since mega use hw serial as discussed in previous posts.
I’m doing it with a Seeeduino LoRaWAN w/ GPS
Thanks for sharing. However, I do not have those hw/resource and the frequency is EU.

// what’s the name of the hardware serial port?
#define GPSSerial Serial1
I have added #define GPSSerial Serial1
Serial output : However, not receiving any packet in the console.
Sta69,N,01323.7657,E,0.16,292.15,040118,A6F
$GPVTG,292.15,T,M,0.16,N,0.30,K,A34
Packet queued
$GPRMC,095352.000,A,5232.2469,N,01323.7657,E,0.16,292.15,040118,A6F
$GPVTG,292.15,T,M,0.16,N,0.30,K,A34
Packet queued
Starting
,603
$GPRMC,095356.000,A,5232.2473,N,01323.7654,E,0.25,292.15,040118,A63
$GPVTG,292.15,T,M,0.25,N,0.47,K,A*34
$GPGGA,095357.000,5232.2474,N,01323.7655,E,1,06,0.98,69.3,M,44.7,M,5C
$GPGSA,A,3,09,03,31,17,22,02,1.30,0.98,0.86Packet queued
Code…
hi,
pls read this when you are placing lots of code
did you see the edited picture … youre wiring is wrong for the mega
Thank you. I have changed the Pinout : GPS >> Mega
VIN >> 5V
GND >> GND
Tx >> RX1 (19)
Rx >> TX1 (18)
Is it correct? The GPS got a fix but no data in the console