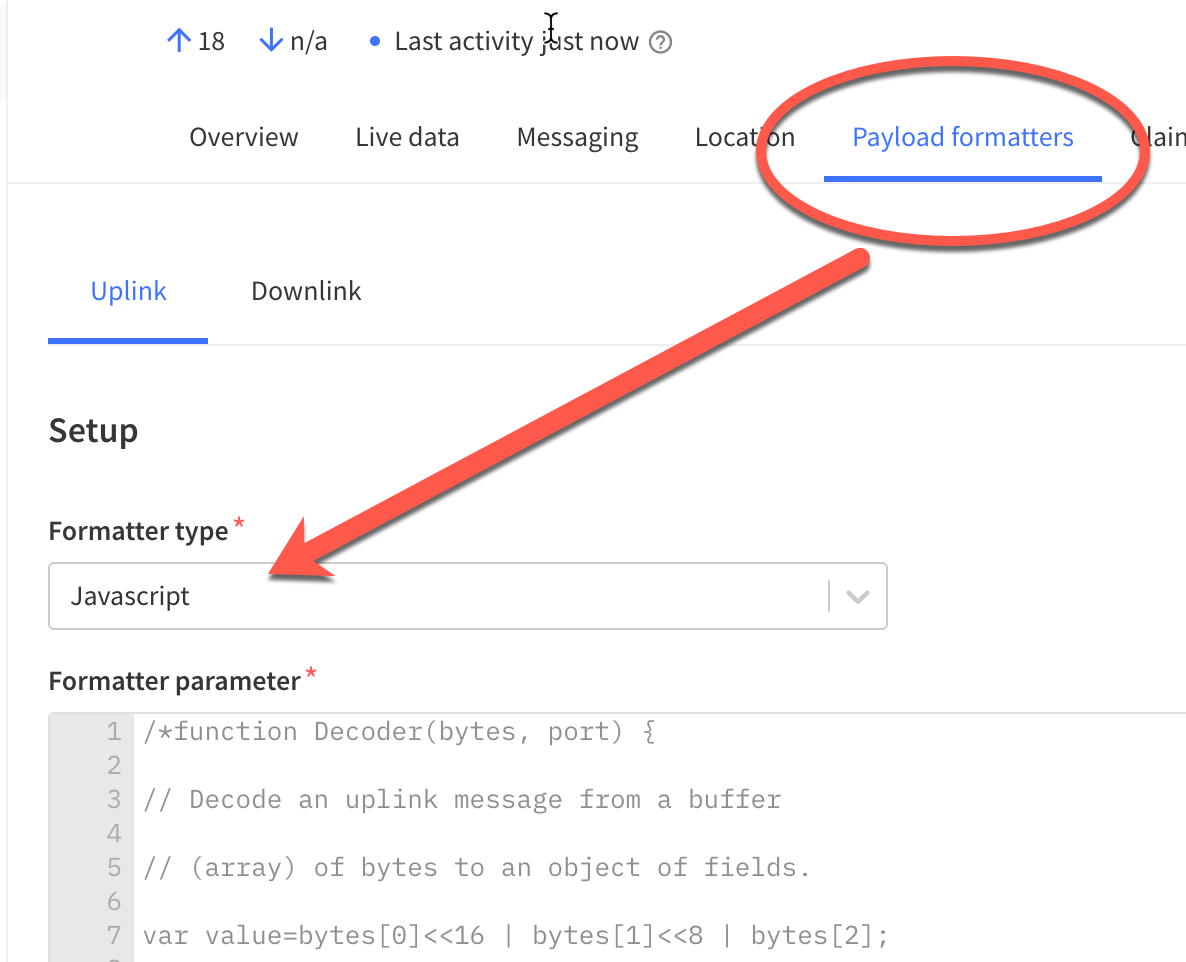
You need to copy & paste the ‘decoder’ into the relevant field under “payload formatter”
I have just downloaded the latest decoder-version form dragino homepage.

Still not working.
Hi, try below one. Might be the same but its the one which finally worked for me and that i just copied from my page. And also put it a the right place (not like me when I tried the 1st time), i.e.as shown on the screenshot.
/*function Decoder(bytes, port) {
// Decode an uplink message from a buffer
// (array) of bytes to an object of fields.
var value=bytes[0]<<16 | bytes[1]<<8 | bytes[2];
if(bytes[0] & 0x80)
{
value |=0xFFFFFF000000;
}
var latitude=value/10000;//gps latitude,units: °
value=bytes[3]<<16 | bytes[4]<<8 | bytes[5];
if(bytes[3] & 0x80)
{
value |=0xFFFFFF000000;
}
var longitude=value/10000;//gps longitude,units: °
var alarm=(bytes[6] & 0x40)?"TRUE":"FALSE";//Alarm status
value=((bytes[6] & 0x3f) <<8) | bytes[7];
var batV=value/1000;//Battery,units:V
value=bytes[8]<<8 | bytes[9];
if(bytes[8] & 0x80)
{
value |=0xFFFF0000;
}
var roll=value/100;//roll,units: °
value=bytes[10]<<8 | bytes[11];
if(bytes[10] & 0x80)
{
value |=0xFFFF0000;
}
var pitch=value/100; //pitch,units: °
return {
Latitude: latitude,
Longitud: longitude,
Roll: roll,
Pitch:pitch,
BatV:batV,
ALARM_status:alarm,
};
}*/
//The function is :
function Decoder(bytes, port) {
// Decode an uplink message from a buffer
// (array) of bytes to an object of fields.
var latitude;//gps latitude,units: °
latitude=(bytes[0]<<24 | bytes[1]<<16 | bytes[2]<<8 | bytes[3])/1000000;//gps latitude,units: °
var longitude;
longitude=(bytes[4]<<24 | bytes[5]<<16 | bytes[6]<<8 | bytes[7])/1000000;//gps longitude,units: °
var alarm=(bytes[8] & 0x40)?"TRUE":"FALSE";//Alarm status
var batV=(((bytes[8] & 0x3f) <<8) | bytes[9])/1000;//Battery,units:V
if((bytes[10] & 0xC0)==0x40)
{
var motion_mode="Move";
}
else if((bytes[10] & 0xC0) ==0x80)
{
motion_mode="Collide";
}
else if((bytes[10] & 0xC0) ==0xC0)
{
motion_mode="User";
}
else
{
motion_mode="Disable";
} //mode of motion
var led_updown=(bytes[10] & 0x20)?"ON":"OFF";//LED status for position,uplink and downlink
var Firmware = 160+(bytes[10] & 0x1f); // Firmware version; 5 bits
var roll=(bytes[11]<<24>>16 | bytes[12])/100;//roll,units: °
var pitch=(bytes[13]<<24>>16 | bytes[14])/100; //pitch,units: °
var hdop = 0;
if(bytes[15] > 0)
{
hdop =bytes[15]/100; //hdop,units: °
}
else
{
hdop =bytes[15];
}
var altitude =(bytes[16]<<24>>16 | bytes[17]) / 100; //Altitude,units: °
return {
Latitude: latitude,
Longitude: longitude,
Roll: roll,
Pitch:pitch,
BatV:batV,
ALARM_status:alarm,
MD:motion_mode,
LON:led_updown,
FW:Firmware,
HDOP:hdop,
Altitude:altitude,
};
}
1 Like
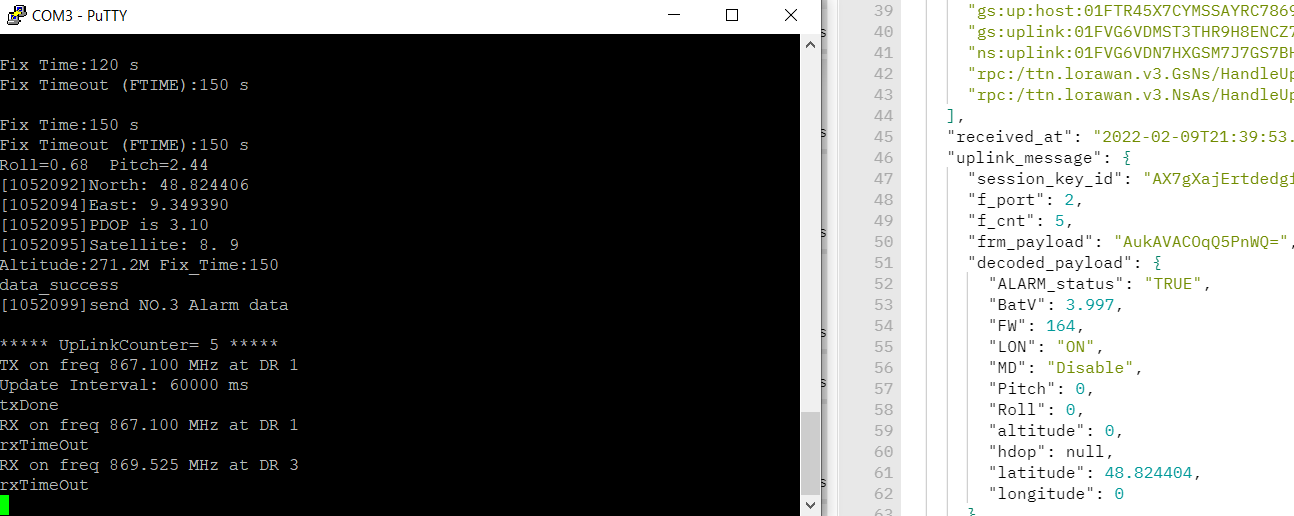
Thank you. Now it is finally working 
1 Like