@jezd searched here and on google but no idea what will work.
now i have made some testing and i get it working 
here i will share the payload decoder its sure not very good code but i works for me maybe it will help other people where searching for ThingSpeak Payload decoders.
regards from Germany
function Decoder(bytes, port) {
if(bytes.length == 1) {
if(bytes[0] == 1) {
return {
'button': 'activated'
}
} else {
return {
'error': 'button action unknown'
}
}
} else if(bytes.length == 5) {
var field2 = (bytes[0]<<8) | bytes[1];
var field1 = (bytes[2]<<8) | bytes[3];
var field3 = (bytes[4] +250) / 100;
return {
'field2': field2/100,
'field1': field1/100,
'field3': field3,
}
} else {
return {
'error': 'payload unknown'
}
}
}
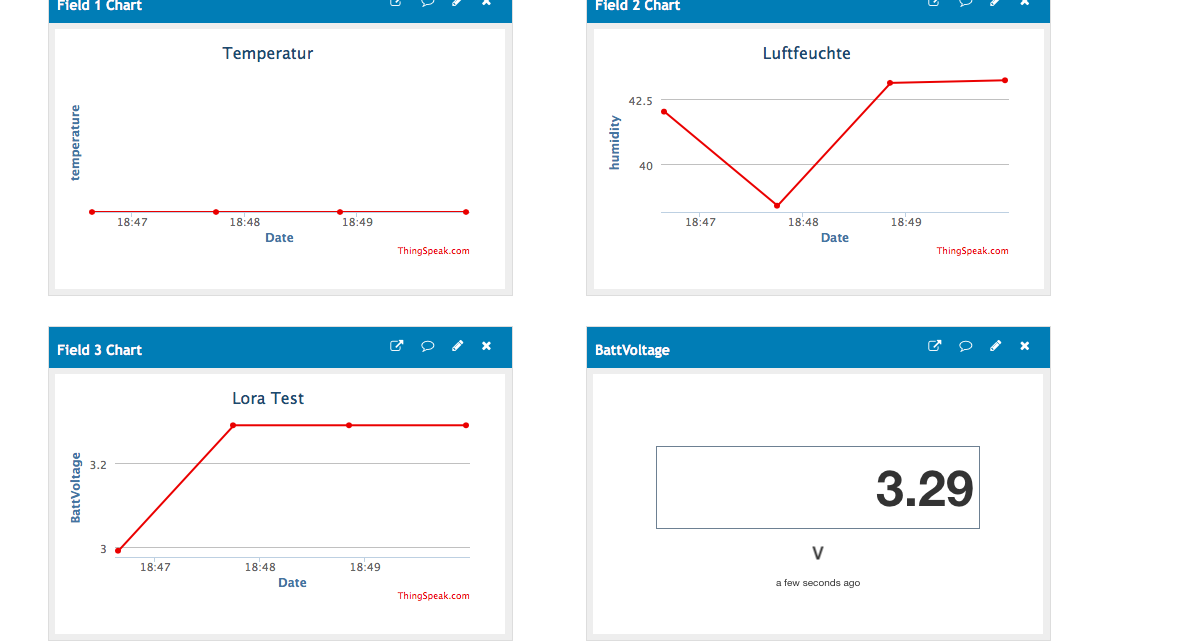
and the result:
{
"field1": 21.6,
"field2": 42.3,
"field3": 2.93
}
1 Like
I throw you this, a working code, when i reset the node i get the same error.
I have no idea how to troubleshoot.
If you had read the thread you would discover that this is NOT AN ERROR
hi! i also have the same problem. i’m trying to send a packet with DHT22 temperature and humidity data to TTN using LoRa. here’s the code i’m using:
/*******************************************************************************
* The Things Network - Sensor Data Example
*
* Example of sending a valid LoRaWAN packet with DHT22 temperature and
* humidity data to The Things Networ using a Feather M0 LoRa.
*
* Learn Guide: https://learn.adafruit.com/the-things-network-for-feather
*
* Copyright (c) 2015 Thomas Telkamp and Matthijs Kooijman
* Copyright (c) 2018 Terry Moore, MCCI
* Copyright (c) 2018 Brent Rubell, Adafruit Industries
*
* Permission is hereby granted, free of charge, to anyone
* obtaining a copy of this document and accompanying files,
* to do whatever they want with them without any restriction,
* including, but not limited to, copying, modification and redistribution.
* NO WARRANTY OF ANY KIND IS PROVIDED.
*******************************************************************************/
#include <lmic.h>
#include <hal/hal.h>
#include <SPI.h>
// include the DHT22 Sensor Library
#include "DHT.h"
// DHT digital pin and sensor type
#define DHTPIN 7
#define DHTTYPE DHT22
//
// For normal use, we require that you edit the sketch to replace FILLMEIN
// with values assigned by the TTN console. However, for regression tests,
// we want to be able to compile these scripts. The regression tests define
// COMPILE_REGRESSION_TEST, and in that case we define FILLMEIN to a non-
// working but innocuous value.
//
#ifdef COMPILE_REGRESSION_TEST
#define FILLMEIN 0
#else
#warning "You must replace the values marked FILLMEIN with real values from the TTN control panel!"
#define FILLMEIN (#dont edit this, edit the lines that use FILLMEIN)
#endif
// This EUI must be in little-endian format, so least-significant-byte
// first. When copying an EUI from ttnctl output, this means to reverse
// the bytes. For TTN issued EUIs the last bytes should be 0xD5, 0xB3,
// 0x70.
static const u1_t PROGMEM APPEUI[8] = { 0x34, 0x34, 0x34, 0x12, 0x12, 0x12, 0x12, 0x12 };
void os_getArtEui (u1_t* buf) { memcpy_P(buf, APPEUI, 8);}
// This should also be in little endian format, see above.
static const u1_t PROGMEM DEVEUI[8] = { 0xF0, 0x21, 0x00, 0xD8, 0x7E, 0xD5, 0xB3, 0x70 };
void os_getDevEui (u1_t* buf) { memcpy_P(buf, DEVEUI, 8);}
// This key should be in big endian format (or, since it is not really a
// number but a block of memory, endianness does not really apply). In
// practice, a key taken from the TTN console can be copied as-is.
static const u1_t PROGMEM APPKEY[16] = { 0x01, 0x7F, 0x12, 0x8B, 0xC8, 0x32, 0x73, 0x2D, 0x0F, 0xFC, 0x38, 0x0C, 0x98, 0x8B, 0xD4, 0x0D };
void os_getDevKey (u1_t* buf) { memcpy_P(buf, APPKEY, 16);}
// payload to send to TTN gateway
static uint8_t payload[5];
static osjob_t sendjob;
// Schedule TX every this many seconds (might become longer due to duty
// cycle limitations).
const unsigned TX_INTERVAL = 10;
// Pin mapping for Adafruit Feather M0 LoRa
const lmic_pinmap lmic_pins = {
.nss = 10,
.rxtx = LMIC_UNUSED_PIN,
.rst = 9,
.dio = {3,4,5},
.rxtx_rx_active = 0,
.rssi_cal = 0, // LBT cal for the Adafruit Feather M0 LoRa, in dB
.spi_freq = 1000000,
};
// init. DHT
DHT dht(DHTPIN, DHTTYPE);
void onEvent (ev_t ev) {
Serial.print(os_getTime());
Serial.print(": ");
switch(ev) {
case EV_SCAN_TIMEOUT:
Serial.println(F("EV_SCAN_TIMEOUT"));
break;
case EV_BEACON_FOUND:
Serial.println(F("EV_BEACON_FOUND"));
break;
case EV_BEACON_MISSED:
Serial.println(F("EV_BEACON_MISSED"));
break;
case EV_BEACON_TRACKED:
Serial.println(F("EV_BEACON_TRACKED"));
break;
case EV_JOINING:
Serial.println(F("EV_JOINING"));
break;
case EV_JOINED:
Serial.println(F("EV_JOINED"));
{
u4_t netid = 0;
devaddr_t devaddr = 0;
u1_t nwkKey[16];
u1_t artKey[16];
LMIC_getSessionKeys(&netid, &devaddr, nwkKey, artKey);
Serial.print("netid: ");
Serial.println(netid, DEC);
Serial.print("devaddr: ");
Serial.println(devaddr, HEX);
Serial.print("artKey: ");
for (int i=0; i<sizeof(artKey); ++i) {
if (i != 0)
Serial.print("-");
Serial.print(artKey[i], HEX);
}
Serial.println("");
Serial.print("nwkKey: ");
for (int i=0; i<sizeof(nwkKey); ++i) {
if (i != 0)
Serial.print("-");
Serial.print(nwkKey[i], HEX);
}
Serial.println("");
}
// Disable link check validation (automatically enabled
// during join, but because slow data rates change max TX
// size, we don't use it in this example.
LMIC_setLinkCheckMode(0);
break;
/*
|| This event is defined but not used in the code. No
|| point in wasting codespace on it.
||
|| case EV_RFU1:
|| Serial.println(F("EV_RFU1"));
|| break;
*/
case EV_JOIN_FAILED:
Serial.println(F("EV_JOIN_FAILED"));
break;
case EV_REJOIN_FAILED:
Serial.println(F("EV_REJOIN_FAILED"));
break;
break;
case EV_TXCOMPLETE:
Serial.println(F("EV_TXCOMPLETE (includes waiting for RX windows)"));
if (LMIC.txrxFlags & TXRX_ACK)
Serial.println(F("Received ack"));
if (LMIC.dataLen) {
Serial.println(F("Received "));
Serial.println(LMIC.dataLen);
Serial.println(F(" bytes of payload"));
}
// Schedule next transmission
os_setTimedCallback(&sendjob, os_getTime()+sec2osticks(TX_INTERVAL), do_send);
break;
case EV_LOST_TSYNC:
Serial.println(F("EV_LOST_TSYNC"));
break;
case EV_RESET:
Serial.println(F("EV_RESET"));
break;
case EV_RXCOMPLETE:
// data received in ping slot
Serial.println(F("EV_RXCOMPLETE"));
break;
case EV_LINK_DEAD:
Serial.println(F("EV_LINK_DEAD"));
break;
case EV_LINK_ALIVE:
Serial.println(F("EV_LINK_ALIVE"));
break;
/*
|| This event is defined but not used in the code. No
|| point in wasting codespace on it.
||
|| case EV_SCAN_FOUND:
|| Serial.println(F("EV_SCAN_FOUND"));
|| break;
*/
case EV_TXSTART:
Serial.println(F("EV_TXSTART"));
break;
default:
Serial.print(F("Unknown event: "));
Serial.println((unsigned) ev);
break;
}
}
void do_send(osjob_t* j){
// Check if there is not a current TX/RX job running
if (LMIC.opmode & OP_TXRXPEND) {
Serial.println(F("OP_TXRXPEND, not sending"));
} else {
// read the temperature from the DHT22
float temperature = dht.readTemperature();
Serial.print("Temperature: "); Serial.print(temperature);
Serial.println(" *C");
// adjust for the f2sflt16 range (-1 to 1)
temperature = temperature / 100;
// read the humidity from the DHT22
float rHumidity = dht.readHumidity();
Serial.print("%RH ");
Serial.println(rHumidity);
// adjust for the f2sflt16 range (-1 to 1)
rHumidity = (0.8899*rHumidity) - 9;
// float -> int
// note: this uses the sflt16 datum (https://github.com/mcci-catena/arduino-lmic#sflt16)
uint16_t payloadTemp = LMIC_f2sflt16(temperature);
// int -> bytes
byte tempLow = lowByte(payloadTemp);
byte tempHigh = highByte(payloadTemp);
// place the bytes into the payload
payload[0] = tempLow;
payload[1] = tempHigh;
// float -> int
uint16_t payloadHumid = LMIC_f2sflt16(rHumidity);
// int -> bytes
byte humidLow = lowByte(payloadHumid);
byte humidHigh = highByte(payloadHumid);
payload[2] = humidLow;
payload[3] = humidHigh;
// prepare upstream data transmission at the next possible time.
// transmit on port 1 (the first parameter); you can use any value from 1 to 223 (others are reserved).
// don't request an ack (the last parameter, if not zero, requests an ack from the network).
// Remember, acks consume a lot of network resources; don't ask for an ack unless you really need it.
LMIC_setTxData2(3, (xref2u1_t)(payload), sizeof(payload), 0);
}
// Next TX is scheduled after TX_COMPLETE event.
}
void setup() {
delay(5000);
while (! Serial);
Serial.begin(9600);
Serial.println(F("Starting"));
dht.begin();
// LMIC init
os_init();
// Reset the MAC state. Session and pending data transfers will be discarded.
LMIC_reset();
LMIC_setClockError(MAX_CLOCK_ERROR * 1 / 100);
// Disable link-check mode and ADR, because ADR tends to complicate testing.
LMIC_setLinkCheckMode(0);
// Set the data rate to Spreading Factor 7. This is the fastest supported rate for 125 kHz channels, and it
// minimizes air time and battery power. Set the transmission power to 14 dBi (25 mW).
LMIC_setDrTxpow(DR_SF7,14);
// Start job (sending automatically starts OTAA too)
do_send(&sendjob);
}
void loop() {
// we call the LMIC's runloop processor. This will cause things to happen based on events and time. One
// of the things that will happen is callbacks for transmission complete or received messages. We also
// use this loop to queue periodic data transmissions. You can put other things here in the `loop()` routine,
// but beware that LoRaWAN timing is pretty tight, so if you do more than a few milliseconds of work, you
// will want to call `os_runloop_once()` every so often, to keep the radio running.
os_runloop_once();
}
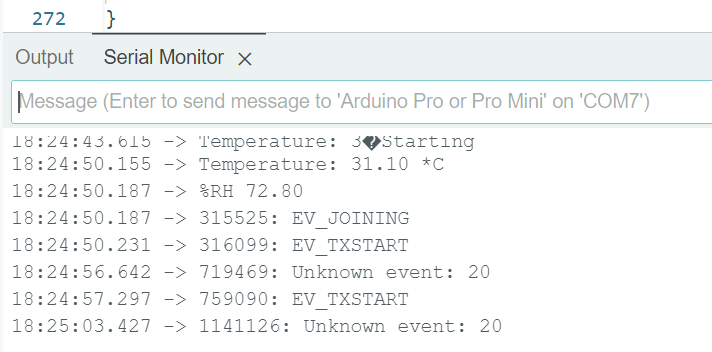
however, the output in the serial monitor shows a join and start loop and the sensor can’t connect to TTN.
To get a useful answer you need to be more specific about what “the same problem” is.
One of the instances of the ev_t enum (the one with index 20) is not handled in your onEvent() handler. You should look up the definition of the ev_t enum and find out which one has numerical value 20. Perhaps you can then add a case for it in the onEvent() handler and process the event (e.g. ignore the event if does not matter for you).
Same question was asked over in the Arduino forums, the user appears to have made a configuration error;
Indeed - massive breach of the FUP - but they’ll probably get arrested soon ![]()
1 Like