Thanks for the responses, good to hear that using app + node together is no problem.
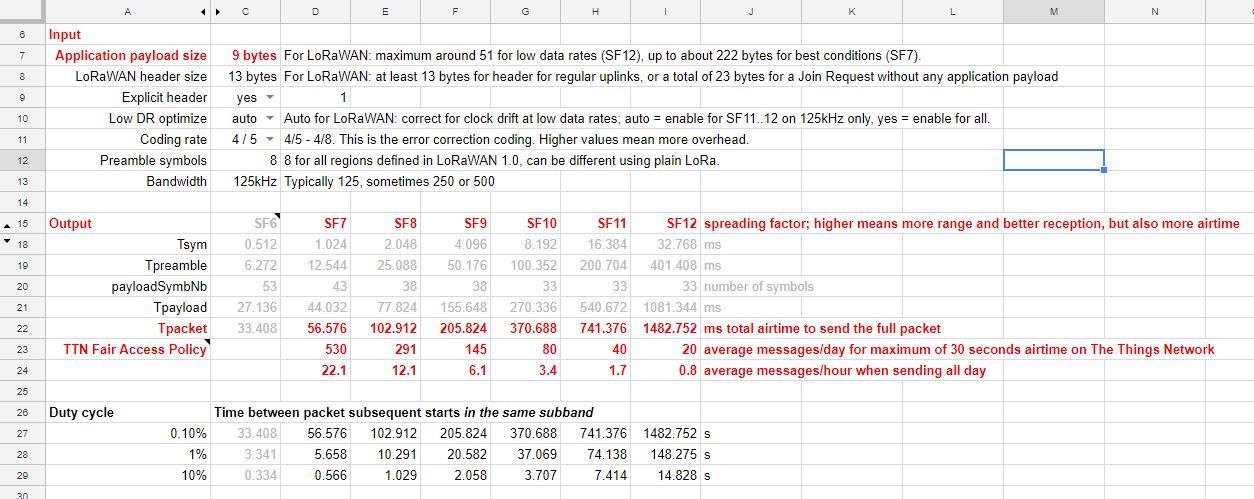
Ok, had to look up what that means, if I use the spreadsheet linked here and given that I only need 9 bytes for the data in the package, I could send 22 messages per hour (or one every 6 seconds)
I’ll have a look at the other examples to see if my microPython code is consistent with them.