Doh! Should have spotted the name. Perhaps I should look at some disposable launches, I’ve got gas begging to be used stuck in the shed all this past year.
But you / we / UKHAS have loads of data that can be used - or even made up based on your own prior launches. Both Peter & Steve have run some LoRaWAN flights this year, Steve definitely fed his in to HABHub so there should be some data there. Put some lines in to a spreadsheet, get a beverage and stare at it.
Not if the first frame in a payload is an absolute fix, which doesn’t actually need to be the full digits as a reference point based on a moving window coupled with last direction can be used.
After some analysis, it may be that the quantisation errors are relatively insignificant over a run of fixes depending on how many decimals accuracy you want the location to run to. Again, model it in a spreadsheet, you never know what may turn up.
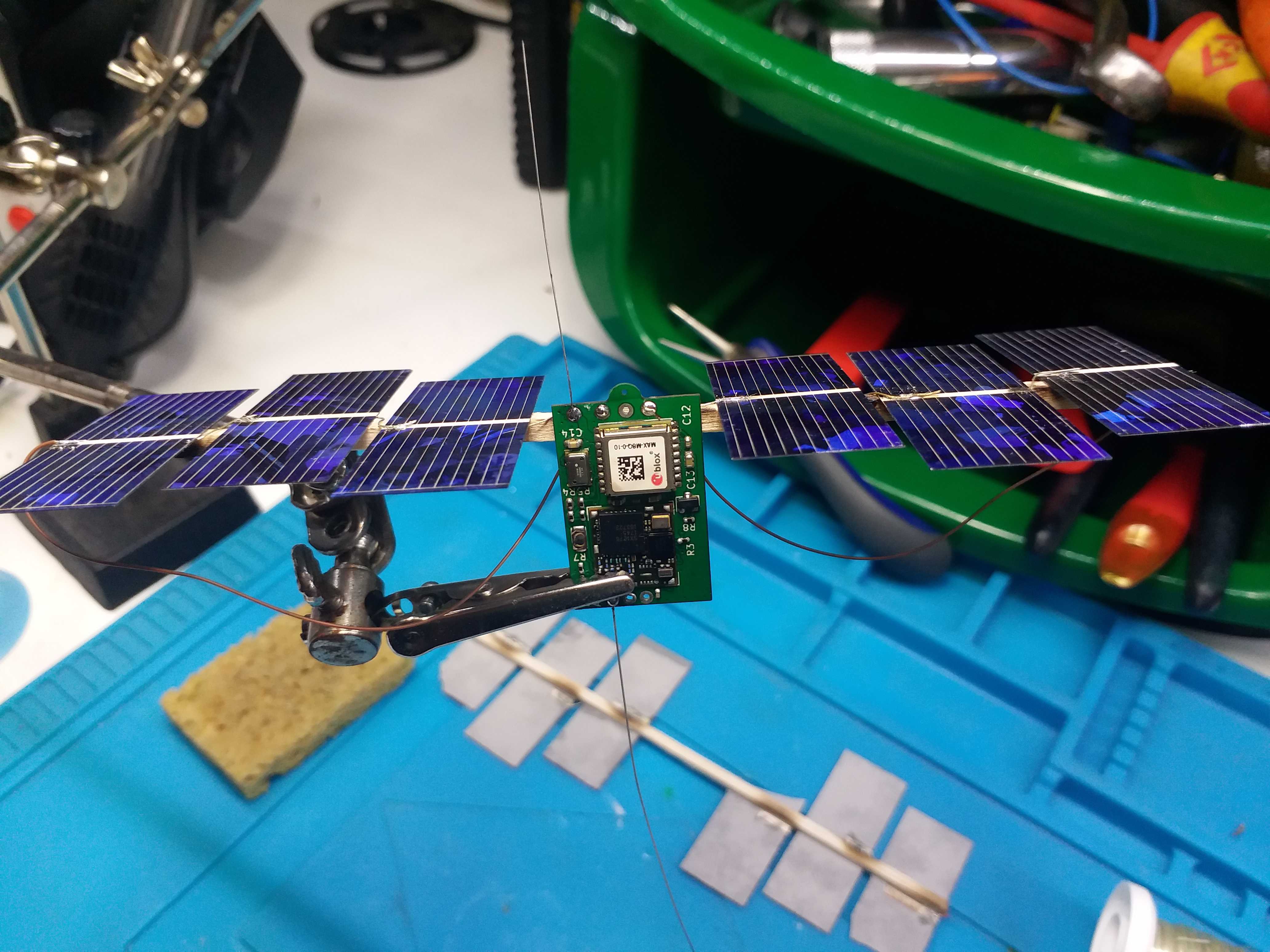
As you are solar powered, if you can charge a supercap, then the first frame can have the absolute time and subsequent frames can be assumed to have happened on schedule. The timestamp could be two bytes with a base line of first transmission at turn on, giving you 45 days before roll over - if the balloon goes quiet for that long it should be feasible to figure out where it in its cycle it is when it’s next heard.