I made one with just an RFM95 on a breadboard HAT - no GPS - it works. Check board_config.py for CS & DIOx pins. The DTOverlay determines the SPI pins IIRC
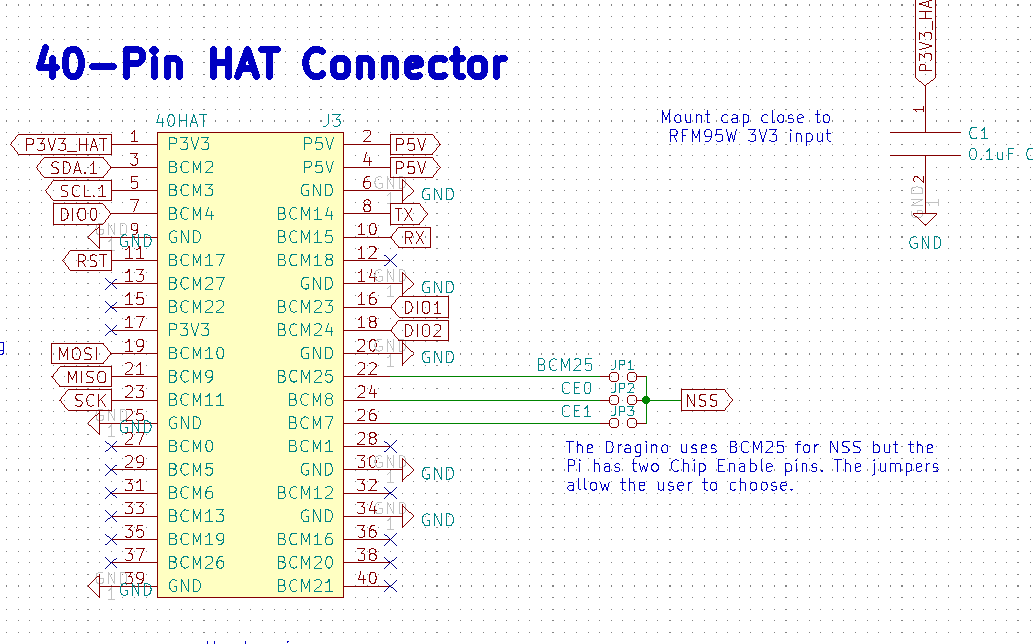
The wiring is simple, it’s just SPI but they chose BCOM pin 2 for the CS.
I made a KiCAD pcb design (not actual PCB) for a dragino with GPS. This will give you the pins.
Without GPS you only need RST,MOSI,MISO,SCK,DIO0,DIO1,DIO2,NSS
Not in Aus but Raspberry Pi LoRa/GPS HAT - RobotShop is expecting 868 versions in on 12th Sept. So ought to be available. They are being made by seedstudio.
I thought the sx127x would run at any frequency 100-1000mhz so I don’t know why they are sold as 868 maybe its just marketting.
I am seeing a reoccurrence of this issue again. Last time I changed the dragino board and the problem resolved itself. I have now changed out two dragino boards and the problem still occurs running the ./test.py command. Of course it could be two faulty boards but these were both new and working ok before suddenly stopped with this error.
any ideas much appreciated!!
pi@unit003:~/water-quality-lorawan-dragino-pi/dragino $ ./test.py
Mode <- SLEEP
Mode <- FSK_STDBY
Traceback (most recent call last):
File "./test.py", line 20, in <module>
D = Dragino("dragino.toml", logging_level=logLevel)
File "/home/pi/water-quality-lorawan-dragino-pi/dragino/dragino/dragino.py", line 85, in __init__
super(Dragino, self).__init__() # LoRa init
File "/home/pi/water-quality-lorawan-dragino-pi/dragino/dragino/SX127x/LoRa.py", line 100, in __init__
self.rx_chain_calibration(calibration_freq)
File "/home/pi/water-quality-lorawan-dragino-pi/dragino/dragino/SX127x/LoRa.py", line 854, in rx_chain_calibration
self.set_mode(op_mode_bkup)
File "/home/pi/water-quality-lorawan-dragino-pi/dragino/dragino/SX127x/LoRa.py", line 221, in set_mode
sys.stderr.write("Mode <- %s\n" % MODE.lookup[mode])
KeyError: 0
I replied to this at least two weeks ago on a PM reply to your PM but I have not heard back. Have you fixed it.
For the benefit of other readers:-
Somewhere in your version of the code you are trying to put the RFM9x to sleep using mode 0 (Key Error: 0), which isn’t a LoRa sleep mode listed in Constants.py. It should be 0x81 (i.e. MODE.SLEEP is defined in Constants.py as 0x81 not 0x00).
The workaround I used was to swap out the dragino board and this worked for a couple of days before the problem reappeared. I then swapped out the board for the orginal one and this worked again (and is still working).
I looked at the code in LoRa.py and see this section with MODE.lookup[mode]) but I dont see this defined as 0x00.
In Constant.py the MODE.SLEEP is defined as 0X80
So I suppose I cannot find what you are saying needs to be changed, what am I doing wrong?
def set_mode(self, mode):
""" Set the mode
:param mode: Set the mode. Use constants.MODE class
:return: New mode
"""
# the mode is backed up in self.mode
if mode == self.mode:
return mode
if self.verbose:
sys.stderr.write("Mode <- %s\n" % MODE.lookup[mode])
self.mode = mode
return self.spi.xfer([REG.LORA.OP_MODE | 0x80, mode])[1]
or we could try raising an exception which should give a traceback showing where the value of mode was set to zero.
def set_mode(self, mode):
""" Set the mode
:param mode: Set the mode. Use constants.MODE class
:return: New mode
"""
# the mode is backed up in self.mode
if mode == self.mode:
return mode
if mode==0:
raise Exception("Invalid mode value")
if self.verbose:
sys.stderr.write("Mode <- %s\n" % MODE.lookup[mode])
self.mode = mode
return self.spi.xfer([REG.LORA.OP_MODE | 0x80, mode])[1]
I find it hard to believe the Dragino RFM95’s are developing faults.
I will add raising an exception and let you know what happens. I have three units now and all have behaved themselves since the last board swap. Thanks very much for your help here.
Yes do let me know. I’m wondering if its an uninitialised value.
I’m working on conversion to CircuitPython and have LoRaWAN running on Pico+rfm95 talking to TTN. I’m doing testing and documenting it. If the problem is buried in the code it would affect the new setup too.
Not dumb. One of my projects was configured to reboot if a certain downlink message was received.
You could use port numbers.
There are a number of ways to do it. If you use systemd you can configure your task to auto start if it stops. Then send a downlink which tells your task to exit.
hi
The KeyError: 0 problem returned and I have implemented the change in LoRa.py to raise the ecception. I am not sure if the output sheds any light on the issue
The code you provided I had to modify as it raised an indent issue(which I thought was strange ) when run. My LoRa.py is below.
Below is the output after running the test.py.
pi@unit002B:~/water-quality-lorawan-dragino-pi/dragino $ python3 test.py
Mode <- SLEEP
Mode <- FSK_STDBY
Traceback (most recent call last):
File "test.py", line 20, in <module>
D = Dragino("dragino.toml", logging_level=logLevel)
File "/home/pi/water-quality-lorawan-dragino-pi/dragino/dragino/dragino.py", line 85, in __init__
super(Dragino, self).__init__() # LoRa init
File "/home/pi/water-quality-lorawan-dragino-pi/dragino/dragino/SX127x/LoRa.py", line 100, in __init__
self.rx_chain_calibration(calibration_freq)
File "/home/pi/water-quality-lorawan-dragino-pi/dragino/dragino/SX127x/LoRa.py", line 860, in rx_chain_calibration
self.set_mode(op_mode_bkup)
File "/home/pi/water-quality-lorawan-dragino-pi/dragino/dragino/SX127x/LoRa.py", line 223, in set_mode
raise Exception("Invalid mode value")
Exception: Invalid mode value
pi@unit002B:~/water-quality-lorawan-dragino-pi/dragino $
LoRa.py
def set_mode(self, mode):
""" Set the mode
:param mode: Set the mode. Use constants.MODE class
:return: New mode
"""
# the mode is backed up in self.mode
if mode == self.mode:
return mode
if mode==0:
raise Exception("Invalid mode value")
if self.verbose:
sys.stderr.write("Mode <- %s\n" % MODE.lookup[mode])
self.mode = mode
return self.spi.xfer([REG.LORA.OP_MODE | 0x80, mode])[1]
That’s very odd since it has not been a problem before. AGC improves the signal reception.
However, it’s easy enough to fix by replacing line 122 in dragino.py with:-
self.set_agc_auto_on(1)
Could you try that please.
I hasten to add that I’ve never had your problems when using the code with my project.
Note, I will be adding these changes to my dragino repo - when the dust has settled with your device since you appear to be the only one experiencing issues.
That repo will be updated in the future because I’m also developing a driver for the SX126x (Waveshare Pico-Lora-SX126x). The cost of those components is considerably less than a Pi+Dragino if you don’t need GPS.