Thank you for the numerous answers and the help that is really very nice and not a matter of course in today’s world.
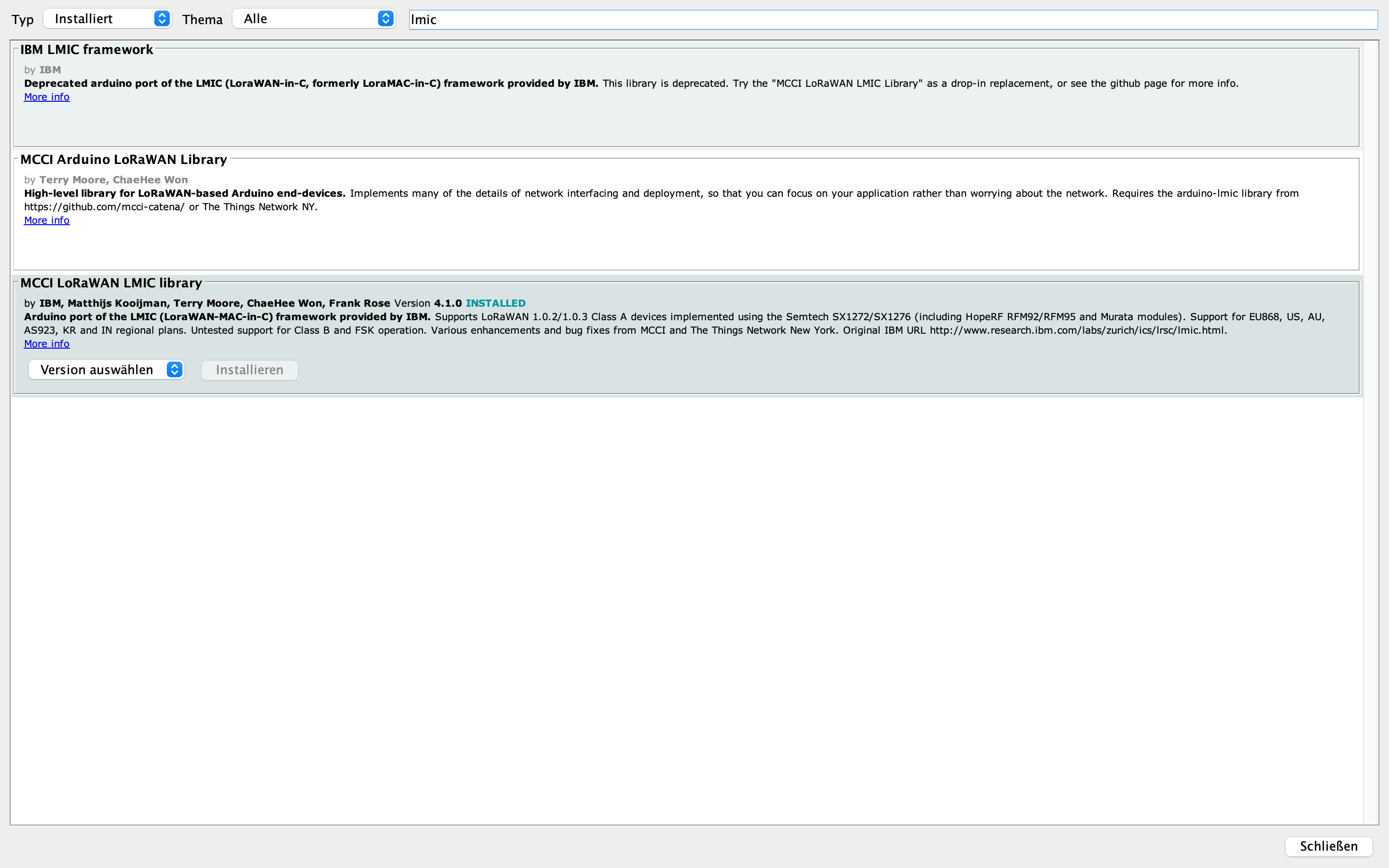
I updated the lmic to 4.1.0. and instead of the EUI with only zeros, I generated one via the generator.
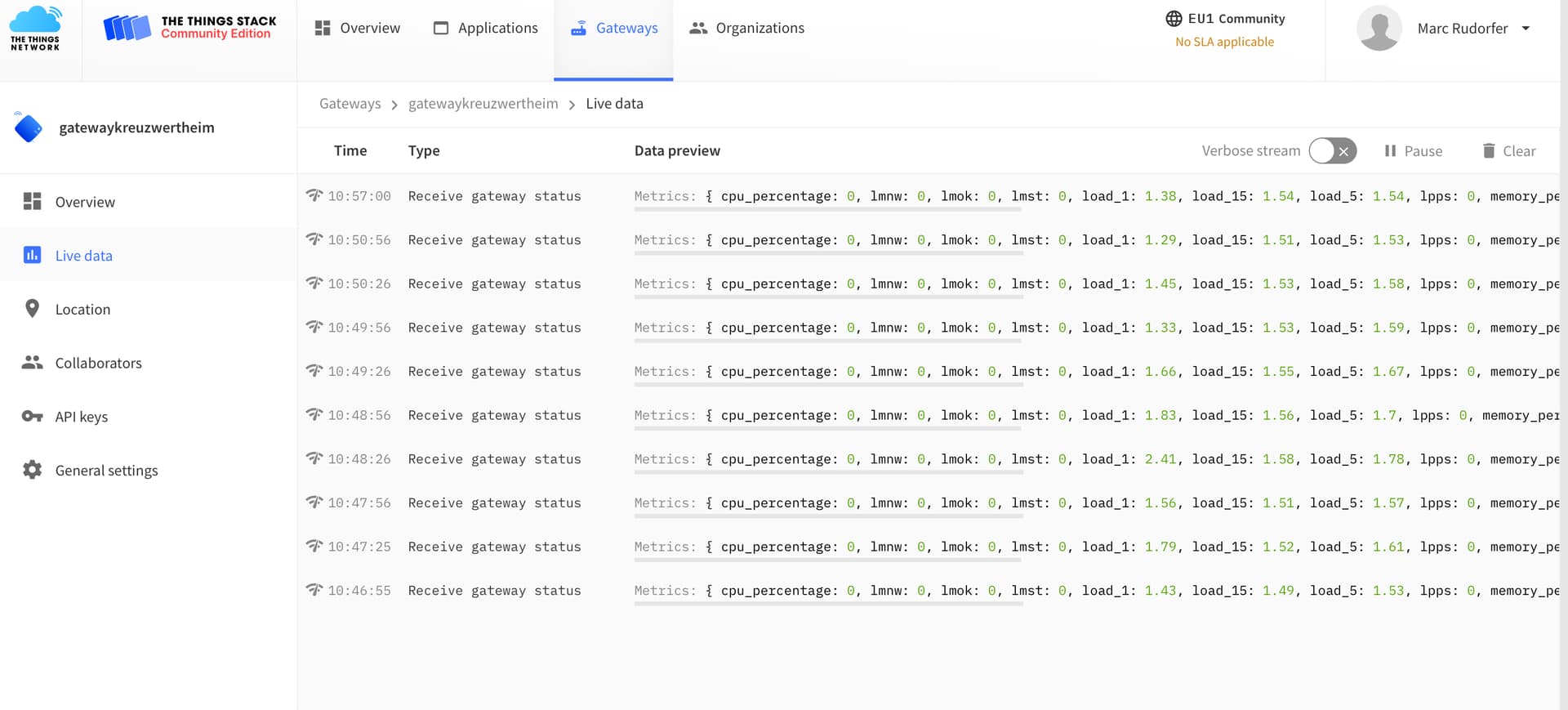
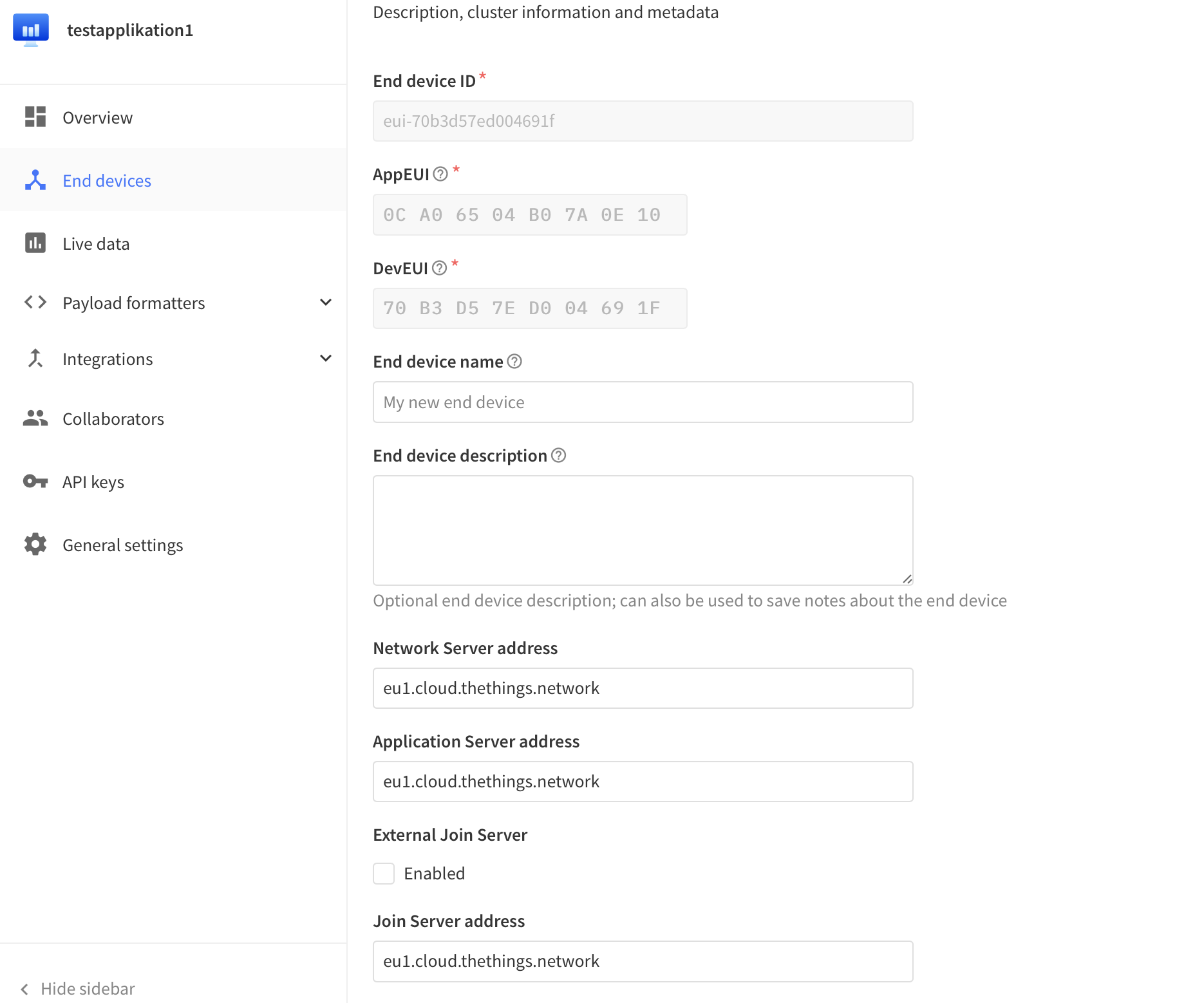
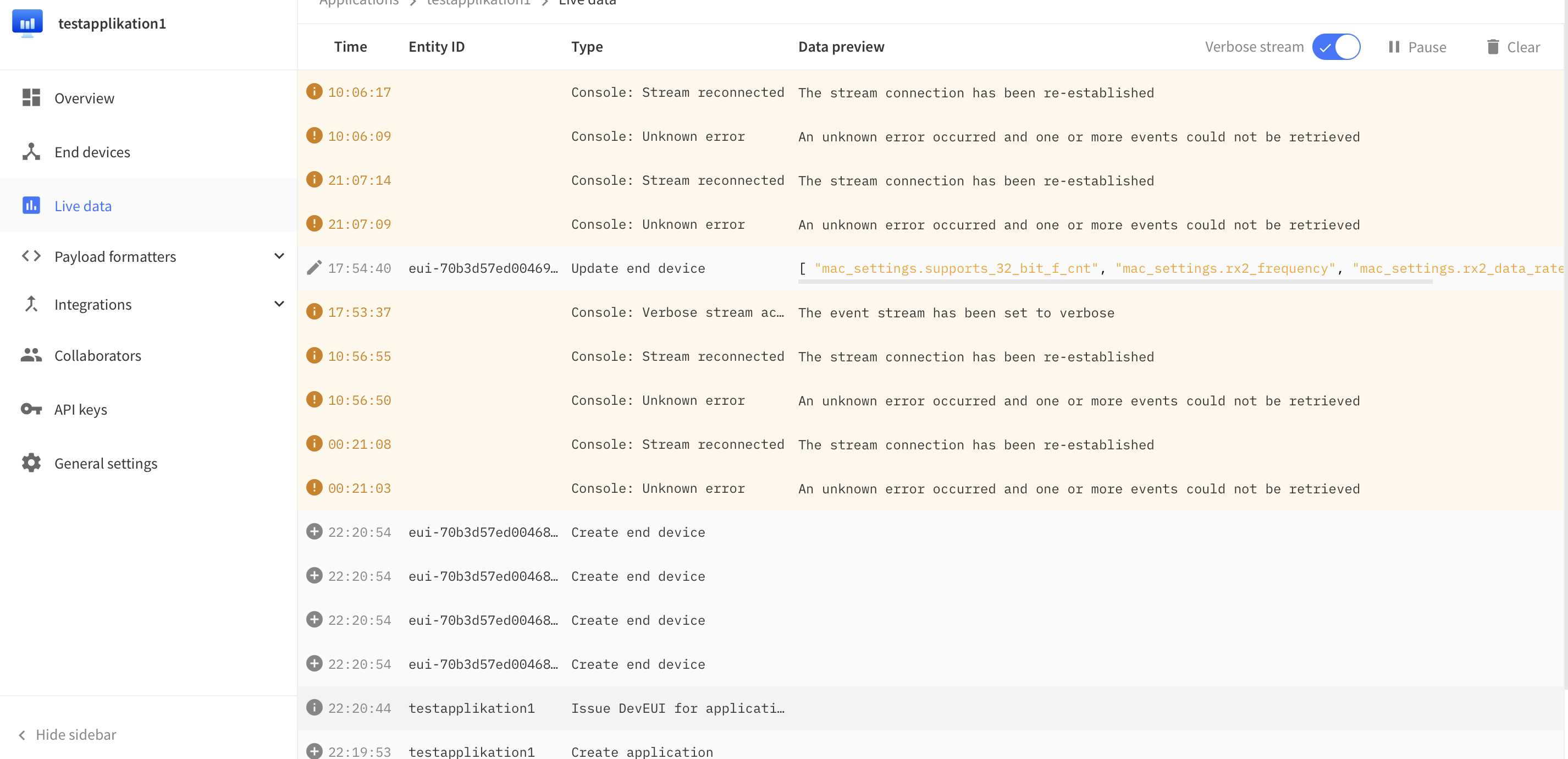
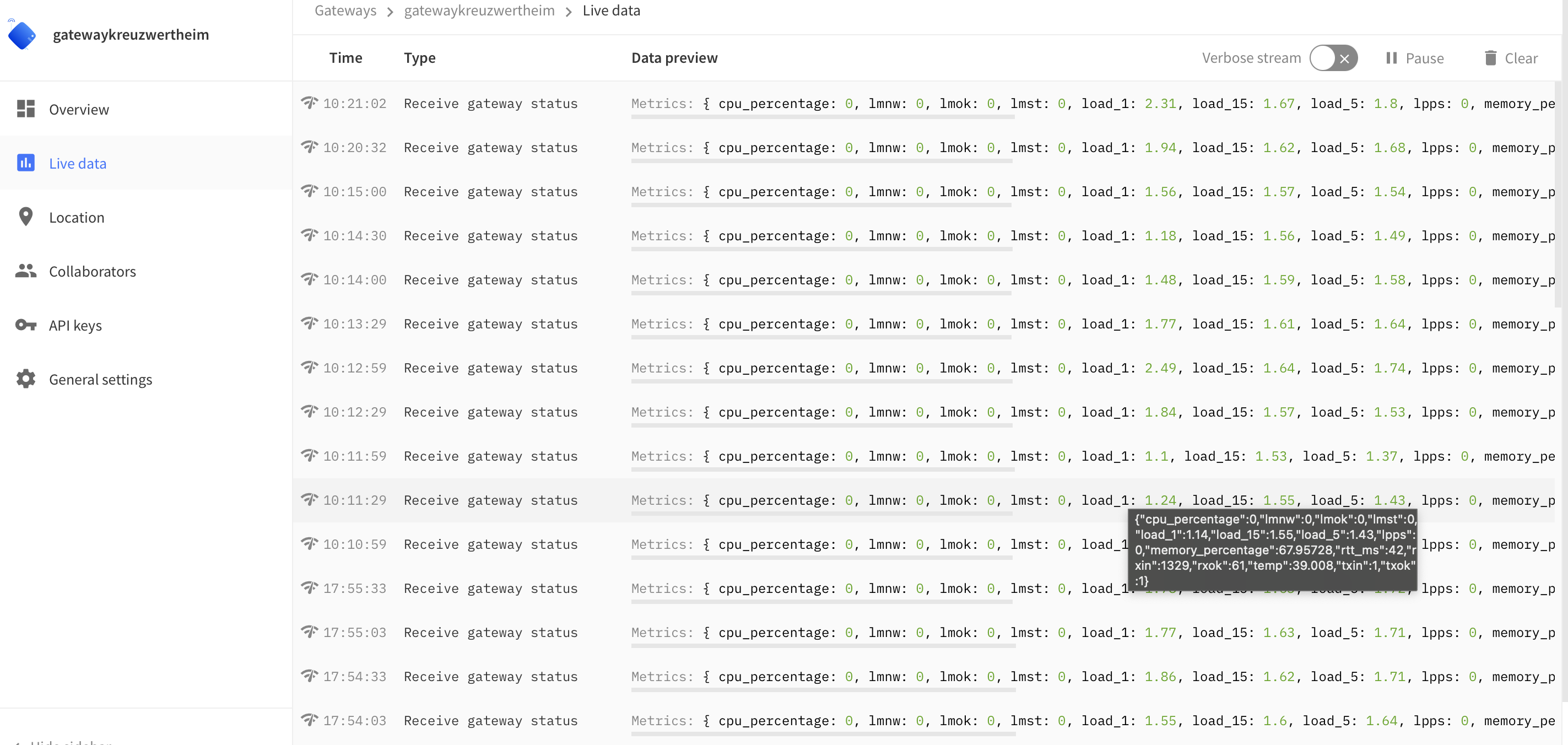
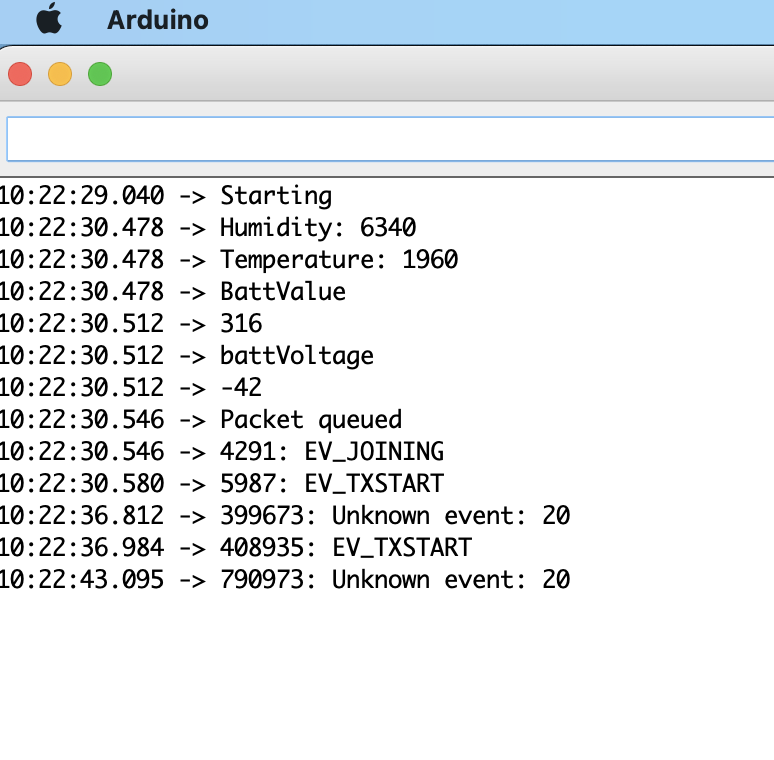
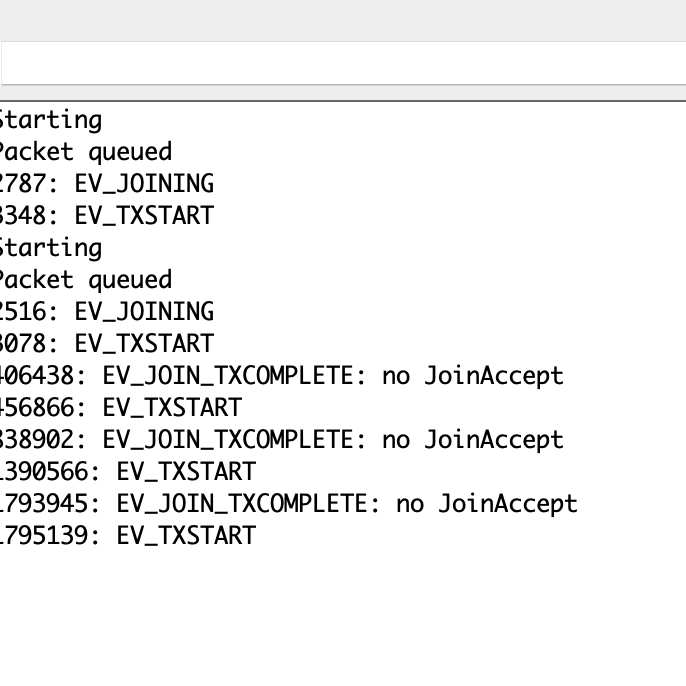
Then I entered the APP EUI and the DEV EUI in lsb format. The APP key in msb format. and tested again with the same result  I don’t know what else I can do or what “could be wrong” in the appendix again some pictures and here the code including keys maybe someone sees an error. Or maybe someone has an Arduinio program that I can test (of course I add my keys beforehand) to test whether it is possibly due to the gateway and not to the arduino sketch? Many greetings Marc
I don’t know what else I can do or what “could be wrong” in the appendix again some pictures and here the code including keys maybe someone sees an error. Or maybe someone has an Arduinio program that I can test (of course I add my keys beforehand) to test whether it is possibly due to the gateway and not to the arduino sketch? Many greetings Marc
#include <lmic.h>
#include <hal/hal.h>
#include <SPI.h>
#include <DHT.h>
#include <DHT_U.h>
#include <Adafruit_Sensor.h>
//
// For normal use, we require that you edit the sketch to replace FILLMEIN
// with values assigned by the TTN console. However, for regression tests,
// we want to be able to compile these scripts. The regression tests define
// COMPILE_REGRESSION_TEST, and in that case we define FILLMEIN to a non-
// working but innocuous value.
//
#ifdef COMPILE_REGRESSION_TEST
# define FILLMEIN 0
#else
# warning "You must replace the values marked FILLMEIN with real values from the TTN control panel!"
# define FILLMEIN (#dont edit this, edit the lines that use FILLMEIN)
#endif
// This EUI must be in little-endian format, so least-significant-byte
// first. When copying an EUI from ttnctl output, this means to reverse
// the bytes. For TTN issued EUIs the last bytes should be 0xD5, 0xB3,
// 0x70.
static const u1_t PROGMEM APPEUI[8]= { 0x10, 0x0E, 0x7A, 0xB0, 0x04, 0x65, 0xA0, 0x0C };
void os_getArtEui (u1_t* buf) { memcpy_P(buf, APPEUI, 8);}
// This should also be in little endian format, see above.
static const u1_t PROGMEM DEVEUI[8]= { 0x1F, 0x69, 0x04, 0xD0, 0x7E, 0xD5, 0xB3, 0x70 };
void os_getDevEui (u1_t* buf) { memcpy_P(buf, DEVEUI, 8);}
// This key should be in big endian format (or, since it is not really a
// number but a block of memory, endianness does not really apply). In
// practice, a key taken from ttnctl can be copied as-is.
static const u1_t PROGMEM APPKEY[16]= { 0x2E, 0x66, 0x6D, 0xFB, 0x51, 0x9D, 0xF6, 0x79, 0x2F, 0x84, 0xB4, 0x1F, 0xC3, 0x13, 0xB0, 0x40 };
void os_getDevKey (u1_t* buf) { memcpy_P(buf, APPKEY, 16);}
static uint8_t btn_activated[1] = { 0x01};
static osjob_t sendjob;
// Schedule TX every this many seconds (might become longer due to duty
// cycle limitations).
const unsigned TX_INTERVAL = 60;
// Pin mapping
const lmic_pinmap lmic_pins = {
.nss = 10,
.rxtx = LMIC_UNUSED_PIN,
.rst = 5,
.dio = {2, 3, LMIC_UNUSED_PIN},
};
//------ Added ----------------
#define LED_YELLOW 8
#define LED_GREEN 6
#define DHT_PIN 7
#define BTN_PIN 9
// DHT11 or DHT22
#define DHTTYPE DHT22
// Initialize dht
DHT dht(DHT_PIN, DHTTYPE);
int buttonState = 0; // current state of the button
int lastButtonState = 0; // previous state of the button
int BattValue = 0;
int BattOut = A1; //Voltage Divider INPUT
//-----------------------------
void onEvent (ev_t ev) {
Serial.print(os_getTime());
Serial.print(": ");
switch(ev) {
case EV_SCAN_TIMEOUT:
Serial.println(F("EV_SCAN_TIMEOUT"));
break;
case EV_BEACON_FOUND:
Serial.println(F("EV_BEACON_FOUND"));
break;
case EV_BEACON_MISSED:
Serial.println(F("EV_BEACON_MISSED"));
break;
case EV_BEACON_TRACKED:
Serial.println(F("EV_BEACON_TRACKED"));
break;
case EV_JOINING:
LMIC_setDrTxpow(DR_SF9,14);
Serial.println(F("EV_JOINING"));
break;
case EV_JOINED:
Serial.println(F("EV_JOINED"));
{
u4_t netid = 0;
devaddr_t devaddr = 0;
u1_t nwkKey[16];
u1_t artKey[16];
LMIC_getSessionKeys(&netid, &devaddr, nwkKey, artKey);
Serial.print("netid: ");
Serial.println(netid, DEC);
Serial.print("devaddr: ");
Serial.println(devaddr, HEX);
Serial.print("artKey: ");
for (int i=0; i<sizeof(artKey); ++i) {
Serial.print(artKey[i], HEX);
}
Serial.println("");
Serial.print("nwkKey: ");
for (int i=0; i<sizeof(nwkKey); ++i) {
Serial.print(nwkKey[i], HEX);
}
Serial.println("");
}
// Disable link check validation (automatically enabled
// during join, but because slow data rates change max TX
// size, we don't use it in this example.
break;
/*
|| This event is defined but not used in the code. No
|| point in wasting codespace on it.
||
|| case EV_RFU1:
|| Serial.println(F("EV_RFU1"));
|| break;
*/
case EV_JOIN_FAILED:
Serial.println(F("EV_JOIN_FAILED"));
break;
case EV_REJOIN_FAILED:
Serial.println(F("EV_REJOIN_FAILED"));
break;
case EV_TXCOMPLETE:
Serial.println(F("EV_TXCOMPLETE (includes waiting for RX windows)"));
if (LMIC.txrxFlags & TXRX_ACK)
Serial.println(F("Received ack"));
if (LMIC.dataLen) {
Serial.print(F("Received "));
Serial.print(LMIC.dataLen);
Serial.println(F(" bytes of payload"));
//------ Added ----------------
if (LMIC.dataLen == 1) {
uint8_t result = LMIC.frame[LMIC.dataBeg + 0];
if (result == 0) {
Serial.println("RESULT 0");
digitalWrite(LED_YELLOW, LOW);
digitalWrite(LED_GREEN, LOW);
}
if (result == 1) {
Serial.println("RESULT 1");
digitalWrite(LED_YELLOW, HIGH);
digitalWrite(LED_GREEN, LOW);
}
if (result == 2) {
Serial.println("RESULT 2");
digitalWrite(LED_YELLOW, LOW);
digitalWrite(LED_GREEN, HIGH);
}
if (result == 3) {
Serial.println("RESULT 3");
digitalWrite(LED_YELLOW, HIGH);
digitalWrite(LED_GREEN, HIGH);
}
}
Serial.println();
//-----------------------------
}
// Schedule next transmission
os_setTimedCallback(&sendjob, os_getTime()+sec2osticks(TX_INTERVAL), do_send);
break;
case EV_LOST_TSYNC:
Serial.println(F("EV_LOST_TSYNC"));
break;
case EV_RESET:
Serial.println(F("EV_RESET"));
break;
case EV_RXCOMPLETE:
// data received in ping slot
Serial.println(F("EV_RXCOMPLETE"));
break;
case EV_LINK_DEAD:
Serial.println(F("EV_LINK_DEAD"));
break;
case EV_LINK_ALIVE:
Serial.println(F("EV_LINK_ALIVE"));
break;
/*
|| This event is defined but not used in the code. No
|| point in wasting codespace on it.
||
|| case EV_SCAN_FOUND:
|| Serial.println(F("EV_SCAN_FOUND"));
|| break;
*/
case EV_TXSTART:
Serial.println(F("EV_TXSTART"));
break;
default:
Serial.print(F("Unknown event: "));
Serial.println((unsigned) ev);
break;
}
}
void do_send(osjob_t* j){
// Check if there is not a current TX/RX job running
if (LMIC.opmode & OP_TXRXPEND) {
Serial.println(F("OP_TXRXPEND, not sending"));
} else {
uint32_t humidity = dht.readHumidity(false) * 100;
uint32_t temperature = dht.readTemperature(false) * 100;
Serial.println("Humidity: " + String(humidity));
Serial.println("Temperature: " + String(temperature));
BattValue = averageAnalogRead(BattOut);
int battVoltage = ( 3.36 / 1024 * BattValue * 2 * 100 ) - 250;
Serial.println("BattValue");
Serial.println(BattValue);
Serial.println("battVoltage");
Serial.println(battVoltage);
byte payload[5];
payload[0] = highByte(humidity);
payload[1] = lowByte(humidity);
payload[2] = highByte(temperature);
payload[3] = lowByte(temperature);
payload[4] = battVoltage;
//Prepare upstream data transmission at the next possible time.
LMIC_setTxData2(1, payload, sizeof(payload), 0);
Serial.println(F("Packet queued"));
}
// Next TX is scheduled after TX_COMPLETE event.
}
//Takes an average of readings on a given pin
//Returns the average
int averageAnalogRead(int pinToRead)
{
byte numberOfReadings = 8;
unsigned int runningValue = 0;
for(int x = 0 ; x < numberOfReadings ; x++)
runningValue += analogRead(pinToRead);
runningValue /= numberOfReadings;
return(runningValue);
}
void setup() {
Serial.begin(9600);
Serial.println(F("Starting"));
//------ Added ----------------
pinMode(LED_YELLOW, OUTPUT);
pinMode(LED_GREEN, OUTPUT);
pinMode(BTN_PIN, INPUT);
digitalWrite(BTN_PIN, LOW);
dht.begin();
//-----------------------------
#ifdef VCC_ENABLE
// For Pinoccio Scout boards
pinMode(VCC_ENABLE, OUTPUT);
digitalWrite(VCC_ENABLE, HIGH);
delay(1000);
#endif
// LMIC init
os_init();
// Reset the MAC state. Session and pending data transfers will be discarded.
LMIC_reset();
LMIC_setAdrMode(1);
LMIC_setLinkCheckMode(1);
LMIC_setClockError(MAX_CLOCK_ERROR * 1 / 100);
// Start job (sending automatically starts OTAA too)
do_send(&sendjob);
}
void loop() {
//------ Added ----------------
// read the state of the button value:
buttonState = digitalRead(BTN_PIN);
// compare the buttonState to its previous state
if (buttonState != lastButtonState) {
if (buttonState == HIGH) {
// if the current state is HIGH then the button went from off to on:
LMIC_setTxData2(1, btn_activated, sizeof(btn_activated), 0);
Serial.println(F("Button On"));
} else {
// if the current state is LOW then the button went from on to off:
Serial.println(F("Button Off"));
}
// Delay a little bit to avoid bouncing
delay(50);
}
// save the current state as the last state, for next time through the loop
lastButtonState = buttonState;
//-----------------------------
os_runloop_once();
}
type or paste code here

 I check it and its this version on my Arduino.ide do you mean I must update ? regards from Germany
I check it and its this version on my Arduino.ide do you mean I must update ? regards from Germany