Sure.
Preface Info: The most important information I have got from the excellent documentation of the LMIC-node!
I have used Platformio (Visual Studio Node) for this.
I downloaded LMIC-node (see post #14) and changed the following:
platformio.ini: changed device to pro8mhzatmega328 (uncomment line 66)
copied lorawan-key-example.h to lortwan-key.h and added my keys (from my TTN devices - I used OTAA mode)
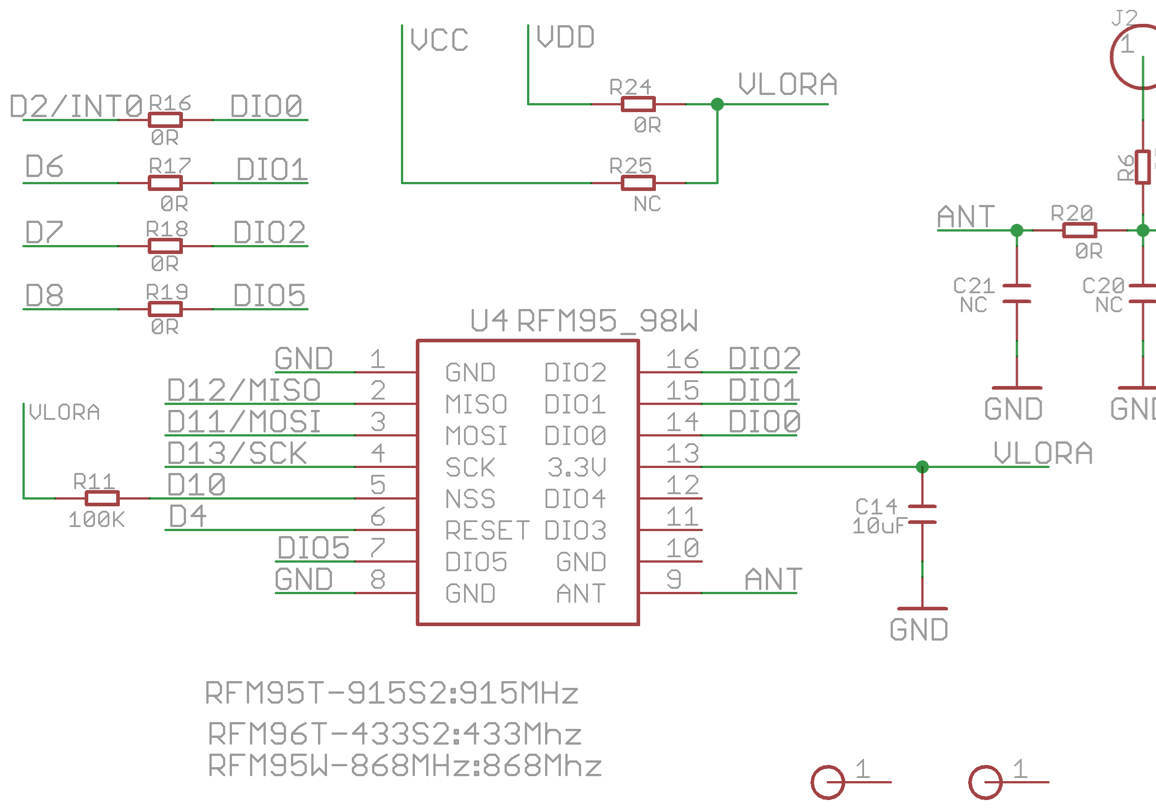
src/boards/bsf_pro8mhzatmega328.h: changed lmic_pinmap (see post #30)
in src/LMIC-node.cpp
// █ █ █▀▀ █▀▀ █▀▄ █▀▀ █▀█ █▀▄ █▀▀ █▀▄ █▀▀ █▀▀ ▀█▀ █▀█
// █ █ ▀▀█ █▀▀ █▀▄ █ █ █ █ █ █▀▀ █▀▄ █▀▀ █ █ █ █ █
// ▀▀▀ ▀▀▀ ▀▀▀ ▀ ▀ ▀▀▀ ▀▀▀ ▀▀ ▀▀▀ ▀▀ ▀▀▀ ▀▀▀ ▀▀▀ ▀ ▀
#include <SPI.h>
#include <Wire.h>
int sensorPin = A2; // select the input pin for the potentiometer
int sensorValue = 0; // variable to store the value coming from the sensor
int sensorPowerCtrlPin = 5;
void sensorPowerOn(void)
{
digitalWrite(sensorPowerCtrlPin, HIGH);//Sensor power on
}
void sensorPowerOff(void)
{
digitalWrite(sensorPowerCtrlPin, LOW);//Sensor power on
}
const uint8_t payloadBufferLength = 4; // Adjust to fit max payload length
// █ █ █▀▀ █▀▀ █▀▄ █▀▀ █▀█ █▀▄ █▀▀ █▀▀ █▀█ █▀▄
// █ █ ▀▀█ █▀▀ █▀▄ █ █ █ █ █ █▀▀ █▀▀ █ █ █ █
// ▀▀▀ ▀▀▀ ▀▀▀ ▀ ▀ ▀▀▀ ▀▀▀ ▀▀ ▀▀▀ ▀▀▀ ▀ ▀ ▀▀
// █ █ █▀▀ █▀▀ █▀▄ █▀▀ █▀█ █▀▄ █▀▀ █▀▄ █▀▀ █▀▀ ▀█▀ █▀█
// █ █ ▀▀█ █▀▀ █▀▄ █ █ █ █ █ █▀▀ █▀▄ █▀▀ █ █ █ █ █
// ▀▀▀ ▀▀▀ ▀▀▀ ▀ ▀ ▀▀▀ ▀▀▀ ▀▀ ▀▀▀ ▀▀ ▀▀▀ ▀▀▀ ▀▀▀ ▀ ▀
static volatile uint16_t counter_ = 0;
// uint16_t getCounterValue()
// {
// // Increments counter and returns the new value.
// delay(50); // Fake this takes some time
// return ++counter_;
// }
// void resetCounter()
// {
// // Reset counter to 0
// counter_ = 0;
// }
void processWork(ostime_t doWorkJobTimeStamp)
{
// This function is called from the doWorkCallback()
// callback function when the doWork job is executed.
// Uses globals: payloadBuffer and LMIC data structure.
// This is where the main work is performed like
// reading sensor and GPS data and schedule uplink
// messages if anything needs to be transmitted.
// begin makerfabs soil moisture sensor
// Reading temperature or humidity takes about 250 milliseconds!
// Sensor readings may also be up to 2 seconds 'old' (its a very slow sensor)
//float humidity = 6.18;//dht.readHumidity();
// Read temperature as Celsius (the default)
// int16_t packetnum = 0; // packet counter, we increment per xmission
// float temperature=0.0;//
// float humidity=0.0;
sensorPowerOn();//
delay(100);
sensorValue = analogRead(sensorPin);
delay(200);
// if (humiditySensor.available() == true)
// {
// //Get the new temperature and humidity value
// temperature = humiditySensor.getTemperature();
// humidity = humiditySensor.getHumidity();
// //Print the results
// Serial.print("Temperature: ");
// Serial.print(temperature, 2);
// Serial.print(" C\t");
// Serial.print("Humidity: ");
// Serial.print(humidity, 2);
// Serial.println("% RH");
// }
// // Check if any reads failed and exit early (to try again).
// if (isnan(humidity) || isnan(temperature)) {
// Serial.println(F("Failed to read from AHT sensor!"));
// //return;
// }
delay(100);
//sensorPowerOff();
// Serial.print(F("Moisture ADC : "));
Serial.println(sensorValue);
//Serial.print(F("Humidity: "));
//Serial.print(humidity);
//Serial.print(F("% Temperature: "));
//Serial.print(temperature);
//Serial.println("Humidity is " + (String)humidity);
//Serial.println("Temperature is " + (String)temperature);
// String message = "#"+(String)packetnum+" Humidity:"+(String)humidity+"% Temperature:"+(String)temperature+"C"+" ADC:"+(String)sensorValue;
// Serial.println(message);
// packetnum++;
// Serial.println("Transmit: Sending to rf95_server");
// Send a message to rf95_server
// uint8_t radioPacket[message.length()+1];
// message.toCharArray(radioPacket, message.length()+1);
// radioPacket[message.length()+1]= '\0';
//Serial.println("Sending..."); delay(10);
//rf95.send((uint8_t *)radioPacket, message.length()+1);
//Serial.println("Waiting for packet to complete..."); delay(10);
//rf95.waitPacketSent();
// Now wait for a reply
//uint8_t buf[RH_RF95_MAX_MESSAGE_LEN];
//uint8_t len = sizeof(buf);
// ende Makerfabs
// Skip processWork if using OTAA and still joining.
if (LMIC.devaddr != 0)
{
// Collect input data.
// For simplicity LMIC-node uses a counter to simulate a sensor.
// The counter is increased automatically by getCounterValue()
// and can be reset with a 'reset counter' command downlink message.
// uint16_t counterValue = getCounterValue();
ostime_t timestamp = os_getTime();
#ifdef USE_DISPLAY
// Interval and Counter values are combined on a single row.
// This allows to keep the 3rd row empty which makes the
// information better readable on the small display.
display.clearLine(INTERVAL_ROW);
display.setCursor(COL_0, INTERVAL_ROW);
display.print("I:");
display.print(doWorkIntervalSeconds);
display.print("s");
display.print(" Ctr:");
display.print(counterValue);
#endif
#ifdef USE_SERIAL
printEvent(timestamp, "Input data collected", PrintTarget::Serial);
printSpaces(serial, MESSAGE_INDENT);
// serial.print(F("COUNTER value: "));
// serial.println(counterValue);
#endif
// For simplicity LMIC-node will try to send an uplink
// message every time processWork() is executed.
// Schedule uplink message if possible
if (LMIC.opmode & OP_TXRXPEND)
{
// TxRx is currently pending, do not send.
#ifdef USE_SERIAL
printEvent(timestamp, "Uplink not scheduled because TxRx pending", PrintTarget::Serial);
#endif
#ifdef USE_DISPLAY
printEvent(timestamp, "UL not scheduled", PrintTarget::Display);
#endif
}
else
{
// Prepare uplink payload.
uint8_t fPort = 10;
// payloadBuffer[0] = counterValue >> 8;
// payloadBuffer[1] = counterValue & 0xFF;
payloadBuffer[0] = sensorValue >> 8;
payloadBuffer[1] = sensorValue & 0xFF;
uint8_t payloadLength = 2;
scheduleUplink(fPort, payloadBuffer, payloadLength);
}
}
}
void processDownlink(ostime_t txCompleteTimestamp, uint8_t fPort, uint8_t* data, uint8_t dataLength)
{
// This function is called from the onEvent() event handler
// on EV_TXCOMPLETE when a downlink message was received.
// Implements a 'reset counter' command that can be sent via a downlink message.
// To send the reset counter command to the node, send a downlink message
// (e.g. from the TTN Console) with single byte value resetCmd on port cmdPort.
const uint8_t cmdPort = 100;
const uint8_t resetCmd= 0xC0;
if (fPort == cmdPort && dataLength == 1 && data[0] == resetCmd)
{
#ifdef USE_SERIAL
printSpaces(serial, MESSAGE_INDENT);
serial.println(F("Reset cmd received"));
#endif
ostime_t timestamp = os_getTime();
//resetCounter();
//printEvent(timestamp, "Counter reset", PrintTarget::All, false);
}
}
// █ █ █▀▀ █▀▀ █▀▄ █▀▀ █▀█ █▀▄ █▀▀ █▀▀ █▀█ █▀▄
// █ █ ▀▀█ █▀▀ █▀▄ █ █ █ █ █ █▀▀ █▀▀ █ █ █ █
// ▀▀▀ ▀▀▀ ▀▀▀ ▀ ▀ ▀▀▀ ▀▀▀ ▀▀ ▀▀▀ ▀▀▀ ▀ ▀ ▀▀
void setup()
{
// boardInit(InitType::Hardware) must be called at start of setup() before anything else.
bool hardwareInitSucceeded = boardInit(InitType::Hardware);
#ifdef USE_DISPLAY
initDisplay();
#endif
#ifdef USE_SERIAL
initSerial(MONITOR_SPEED, WAITFOR_SERIAL_S);
#endif
boardInit(InitType::PostInitSerial);
#if defined(USE_SERIAL) || defined(USE_DISPLAY)
printHeader();
#endif
if (!hardwareInitSucceeded)
{
#ifdef USE_SERIAL
serial.println(F("Error: hardware init failed."));
serial.flush();
#endif
#ifdef USE_DISPLAY
// Following mesage shown only if failure was unrelated to I2C.
display.setCursor(COL_0, FRMCNTRS_ROW);
display.print(F("HW init failed"));
#endif
abort();
}
initLmic();
// █ █ █▀▀ █▀▀ █▀▄ █▀▀ █▀█ █▀▄ █▀▀ █▀▄ █▀▀ █▀▀ ▀█▀ █▀█
// █ █ ▀▀█ █▀▀ █▀▄ █ █ █ █ █ █▀▀ █▀▄ █▀▀ █ █ █ █ █
// ▀▀▀ ▀▀▀ ▀▀▀ ▀ ▀ ▀▀▀ ▀▀▀ ▀▀ ▀▀▀ ▀▀ ▀▀▀ ▀▀▀ ▀▀▀ ▀ ▀
// Place code for initializing sensors etc. here.
pinMode(sensorPowerCtrlPin, OUTPUT);
//digitalWrite(sensorPowerCtrlPin, LOW);//Sensor power on
sensorPowerOn();
//pinMode(sensorPin, INPUT);
// Wire.begin(); //Join I2C bus
// //Check if the AHT10 will acknowledge
// if (humiditySensor.begin() == false)
// {
// Serial.println("AHT10 not detected. Please check wiring. Freezing.");
// //while (1);
// }
// else
// Serial.println("AHT10 acknowledged.");
// resetCounter();
// █ █ █▀▀ █▀▀ █▀▄ █▀▀ █▀█ █▀▄ █▀▀ █▀▀ █▀█ █▀▄
// █ █ ▀▀█ █▀▀ █▀▄ █ █ █ █ █ █▀▀ █▀▀ █ █ █ █
// ▀▀▀ ▀▀▀ ▀▀▀ ▀ ▀ ▀▀▀ ▀▀▀ ▀▀ ▀▀▀ ▀▀▀ ▀ ▀ ▀▀
It is still in a development status.
I removed temperature and humidity as I was going to seal the enclosure to make it outdoor capable and only use the soil moisture sensing functionality.
What is missing: Deep sleep functionality - a must have - I am still reading through the info I have got and try to incorporate this (see post #32 #33)
Observations so far:
- max distance currently not yet acceptable ( I need 900m )
I received a signal when the sensor is 2m above ground but not when on ground (the design of the sensor forces this) - I am going to move my gateway up from currently 2 m above ground to 12m (rooftop) . That might help.
- power supply - 2 AAA batteries - unfortunately the sensor is stopping to work already when the 2 batteries are down to 2.7V ( almost half the battery life left) - not according to the spec. That might change when I get deep sleep up and running (if)
I am curious about your thoughts/plans
Thanks
Eckhard