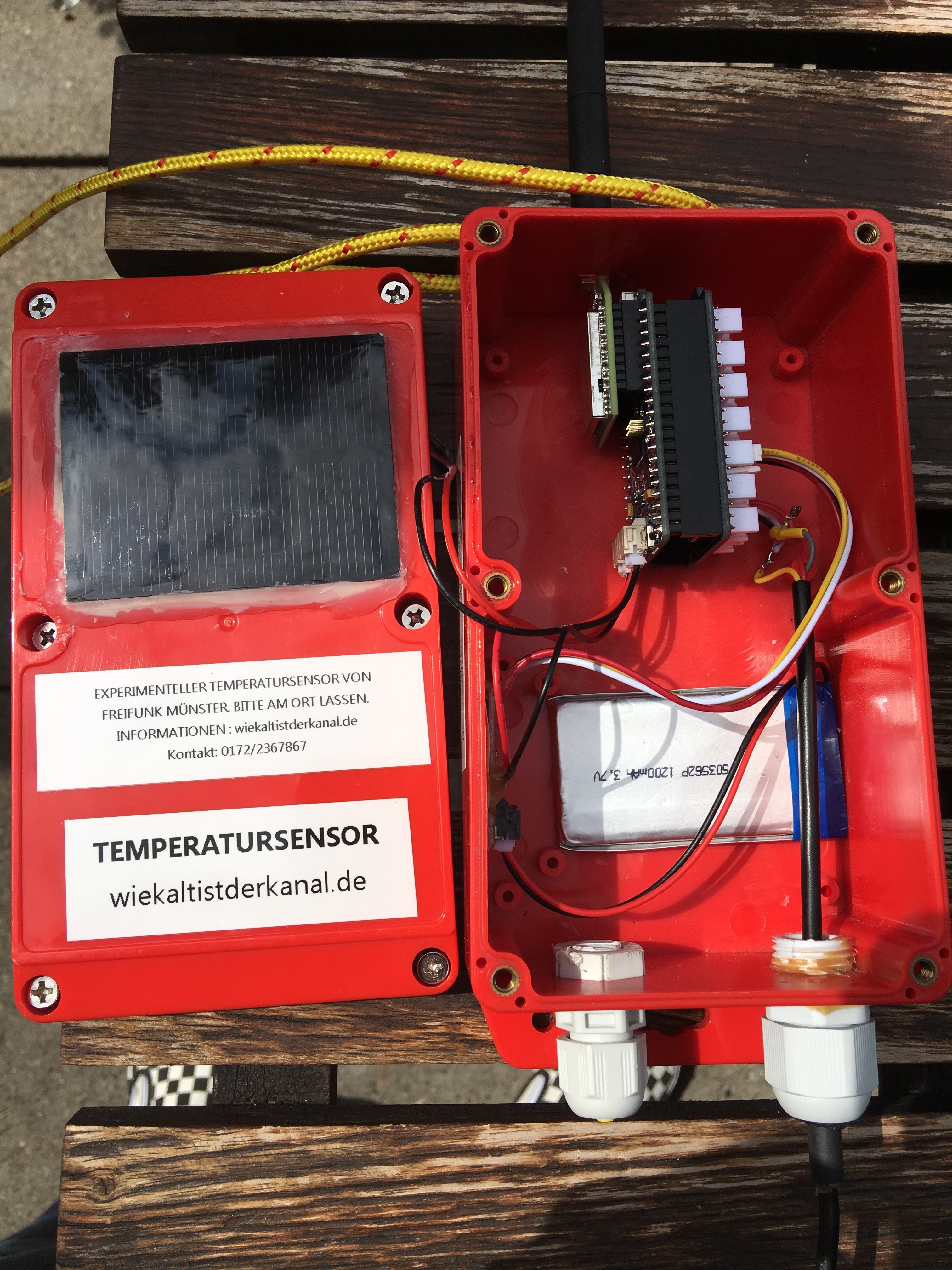
- SODAQ Autonomo + LoraBee (RN2483)
- 0,5 W solar panel
- 1200 mAh LiPo
- Dallas DS1820 temperature sensor
- LTC4150 Coulomb Counter (SparkFun Coulomb Counter Breakout - LTC4150 - BOB-12052 - SparkFun Electronics)
- Red Box Big Red Box - Enclosure
Avergage power consumption is about 1,1mA when updating once every 30 minutes where 1mA is ironically consumed by the coulomb counter. This is strange as the part should have a much lower power consumption. We left it in the system as we want to learn about what happens with a little panel in a non-optimal mounting position. You can see that charge/discharge in the second graph on https://wiekaltistderkanal.de
Another little feature is that we can change the update rate via downlink command - so we can have a high rate when testing and reduce this drastically once everything is stable (to save airtime and power).
Code: GitHub - kgbvax/kanaltemp: Temperature Sensore, Autonomo+RN2483+Dallas Temp Sensor
“Backend” and visualisation is Node Red.
Data is not only exported to the site, opensensemap,dweet but a local Elasticsearch. I plan to replace the Node Red visualisation with Kibana,
Here is what we like to improve for version 2:
- The red case is great but also asking for trouble in the wild. People like the thing but there are always some idiots… So we’ll use something less conspicuous
- Use steel cable ties for the same reason
- Use two temperature sensors to get a depth profile.
- Put the temperature sensors in a perforated plastic pipe that is only loosly affixed to the top. We hope that this makes this more robust against humans and ice as well
- Switch the over-the-air protocol from binary to msgpack (to make it easier to change)
- The current design has a little hole with an inward pipe attached to address condensation. I like to replace this with a membrane to make the thing really waterproof. It is currently mounted 20cm over the waterline and it gets it share of splash from ship swell. Also: the waterlevel is not as constant as we assumed.
- Perhaps carry over an ultrasonic level sensor from another project we’re working on.
- replace the Autonomo with something cheaper.
- use a smaller battery
- use cheap metal case
Let me know if you want to know specifics…