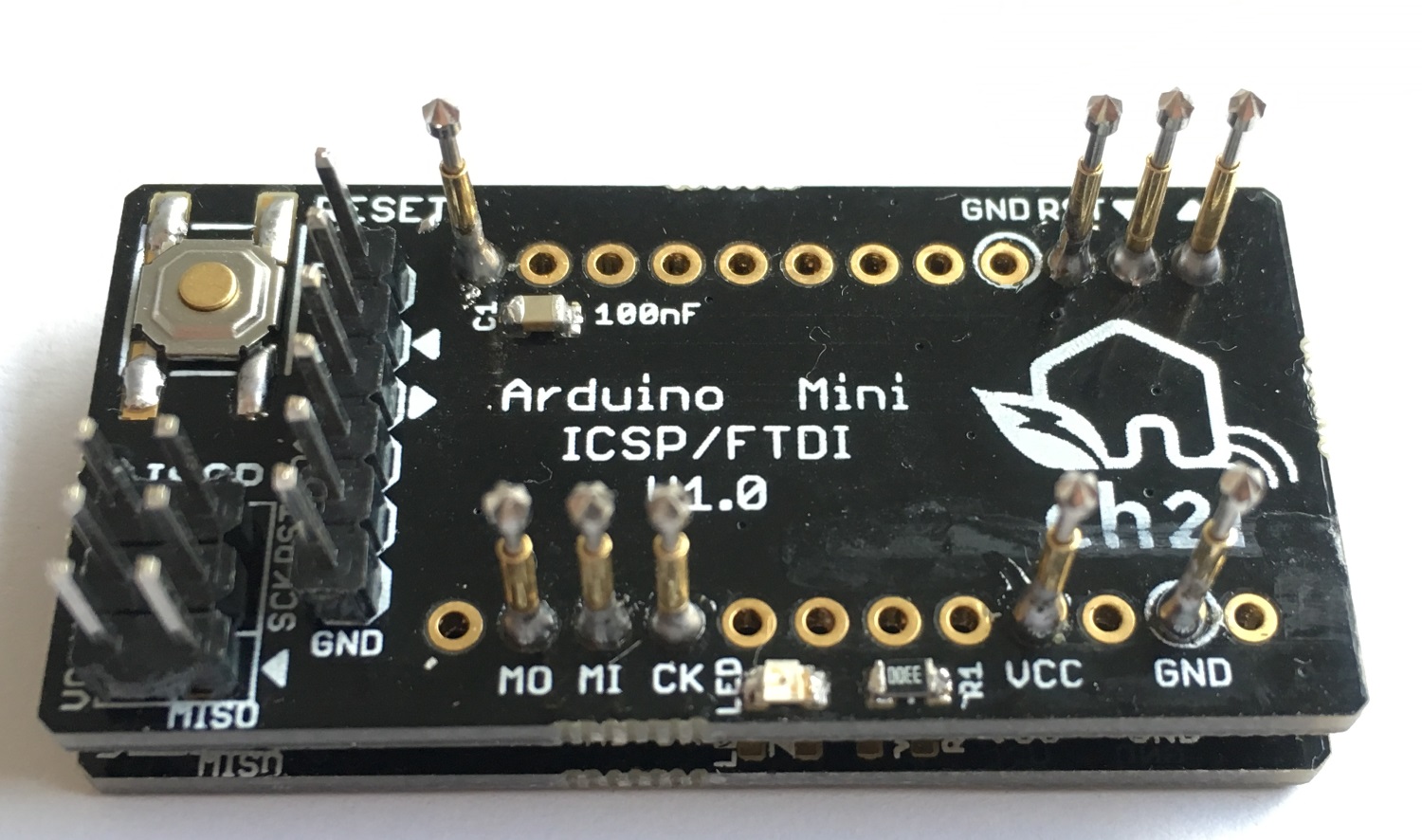
@ursm Updated the github repo for the ICSP programmer with some pictures, but looks like this
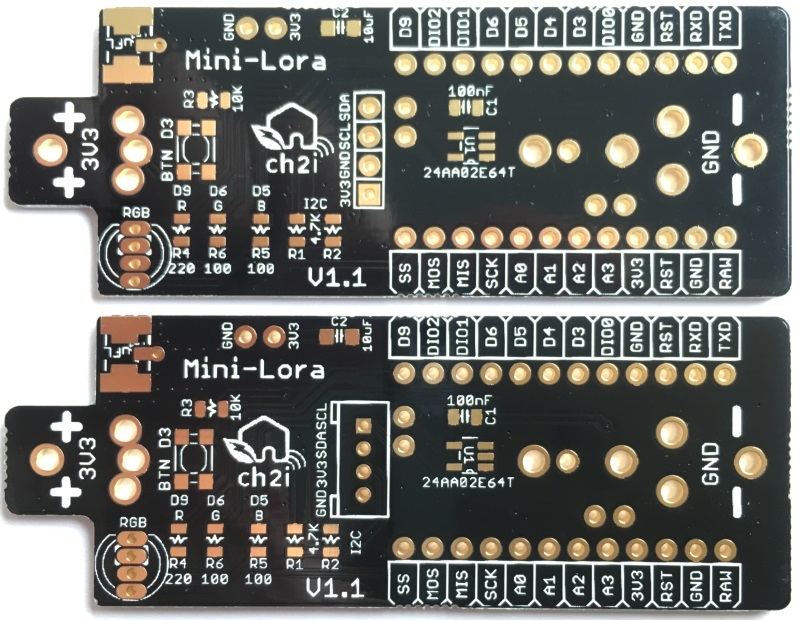
In the meantime, I’ve just received V1.1 of MiniLora PCB, classic and groove, need some testing