It might be worth noting that there were 4 minutes between JOIN REQUEST and JOIN ACCEPT or it might be expected. Here are the logs:
Click to see the full logs
> Starting
> 169: engineUpdate, opmode=0x8
> Packet queued
> 2291: EV_JOINING
> 3460: engineUpdate, opmode=0xc
> 5748: TXMODE, freq=902300000, len=23, SF=7, BW=125, CR=4/5, IH=0
> 316258: RXMODE_SINGLE, freq=923300000, SF=7, BW=500, CR=4/5, IH=0
> 377982: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 387544: engineUpdate, opmode=0xc
> 408404: engineUpdate, opmode=0xc
> 408704: TXMODE, freq=903000000, len=23, SF=8, BW=500, CR=4/5, IH=0
> 719168: RXMODE_SINGLE, freq=923300000, SF=7, BW=500, CR=4/5, IH=0
> 780827: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 790452: engineUpdate, opmode=0xc
> 860912: engineUpdate, opmode=0xc
> 861213: TXMODE, freq=903700000, len=23, SF=8, BW=125, CR=4/5, IH=0
> 1175677: RXMODE_SINGLE, freq=927500000, SF=8, BW=500, CR=4/5, IH=0
> 1238433: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 1247994: engineUpdate, opmode=0xc
> 1285461: engineUpdate, opmode=0xc
> 1285763: TXMODE, freq=914200000, len=23, SF=8, BW=500, CR=4/5, IH=0
> 1596228: RXMODE_SINGLE, freq=927500000, SF=7, BW=500, CR=4/5, IH=0
> 1657888: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 1667448: engineUpdate, opmode=0xc
> 1945076: engineUpdate, opmode=0xc
> 1945378: TXMODE, freq=909700000, len=23, SF=9, BW=125, CR=4/5, IH=0
> 2265571: RXMODE_SINGLE, freq=926300000, SF=9, BW=500, CR=4/5, IH=0
> 2328264: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 2337825: engineUpdate, opmode=0xc
> 2365286: engineUpdate, opmode=0xc
> 2365588: TXMODE, freq=911000000, len=23, SF=8, BW=500, CR=4/5, IH=0
> 2676055: RXMODE_SINGLE, freq=926300000, SF=7, BW=500, CR=4/5, IH=0
> 2737714: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 2747350: engineUpdate, opmode=0xc
> 3407805: engineUpdate, opmode=0xc
> 3408107: TXMODE, freq=902300000, len=23, SF=10, BW=125, CR=4/5, IH=0
> 3738734: RXMODE_SINGLE, freq=923300000, SF=10, BW=500, CR=4/5, IH=0
> 3801298: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 3810858: engineUpdate, opmode=0xc
> 3840822: engineUpdate, opmode=0xc
> 3841124: TXMODE, freq=903000000, len=23, SF=8, BW=500, CR=4/5, IH=0
> 4151589: RXMODE_SINGLE, freq=923300000, SF=7, BW=500, CR=4/5, IH=0
> 4213249: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 4222809: EV_JOIN_FAILED
> 4222838: engineUpdate, opmode=0xc
> 4389635: engineUpdate, opmode=0xc
> 4389936: TXMODE, freq=912300000, len=23, SF=10, BW=125, CR=4/5, IH=0
> 4720563: RXMODE_SINGLE, freq=924500000, SF=10, BW=500, CR=4/5, IH=0
> 4783127: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 4792688: engineUpdate, opmode=0xc
> 4809118: engineUpdate, opmode=0xc
> 4809420: TXMODE, freq=906200000, len=23, SF=8, BW=500, CR=4/5, IH=0
> 5119886: RXMODE_SINGLE, freq=924500000, SF=7, BW=500, CR=4/5, IH=0
> 5181545: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 5191106: EV_JOIN_FAILED
> 5191135: engineUpdate, opmode=0xc
> 5793278: engineUpdate, opmode=0xc
> 5793580: TXMODE, freq=911700000, len=23, SF=10, BW=125, CR=4/5, IH=0
> 6124206: RXMODE_SINGLE, freq=927500000, SF=10, BW=500, CR=4/5, IH=0
> 6186770: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 6196331: engineUpdate, opmode=0xc
> 6258031: engineUpdate, opmode=0xc
> 6258332: TXMODE, freq=914200000, len=23, SF=8, BW=500, CR=4/5, IH=0
> 6568798: RXMODE_SINGLE, freq=927500000, SF=7, BW=500, CR=4/5, IH=0
> 6630458: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 6639955: EV_JOIN_FAILED
> 6639984: engineUpdate, opmode=0xc
> 6851697: engineUpdate, opmode=0xc
> 6851998: TXMODE, freq=908300000, len=23, SF=10, BW=125, CR=4/5, IH=0
> 7182561: RXMODE_SINGLE, freq=926900000, SF=10, BW=500, CR=4/5, IH=0
> 7245125: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 7254760: engineUpdate, opmode=0xc
> 7299393: engineUpdate, opmode=0xc
> 7299694: TXMODE, freq=912600000, len=23, SF=8, BW=500, CR=4/5, IH=0
> 7610224: RXMODE_SINGLE, freq=926900000, SF=7, BW=500, CR=4/5, IH=0
> 7671885: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 7681445: EV_JOIN_FAILED
> 7681475: engineUpdate, opmode=0xc
> 8361638: engineUpdate, opmode=0xc
> 8361940: TXMODE, freq=911900000, len=23, SF=10, BW=125, CR=4/5, IH=0
> 8692502: RXMODE_SINGLE, freq=923300000, SF=10, BW=500, CR=4/5, IH=0
> 8755066: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 8764563: engineUpdate, opmode=0xc
> 8815144: engineUpdate, opmode=0xc
> 8815446: TXMODE, freq=903000000, len=23, SF=8, BW=500, CR=4/5, IH=0
> 9125911: RXMODE_SINGLE, freq=923300000, SF=7, BW=500, CR=4/5, IH=0
> 9187571: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 9197132: EV_JOIN_FAILED
> 9197161: engineUpdate, opmode=0xc
> 10161398: engineUpdate, opmode=0xc
> 10161701: TXMODE, freq=913900000, len=23, SF=10, BW=125, CR=4/5, IH=0
> 10492137: RXMODE_SINGLE, freq=924500000, SF=10, BW=500, CR=4/5, IH=0
> 10554700: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 10564197: engineUpdate, opmode=0xc
> 10585533: engineUpdate, opmode=0xc
> 10585837: TXMODE, freq=906200000, len=23, SF=8, BW=500, CR=4/5, IH=0
> 10896368: RXMODE_SINGLE, freq=924500000, SF=7, BW=500, CR=4/5, IH=0
> 10958028: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 10967525: EV_JOIN_FAILED
> 10967557: engineUpdate, opmode=0xc
> 11319325: engineUpdate, opmode=0xc
> 11319628: TXMODE, freq=906100000, len=23, SF=10, BW=125, CR=4/5, IH=0
> 11650063: RXMODE_SINGLE, freq=925100000, SF=10, BW=500, CR=4/5, IH=0
> 11712627: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 11722135: engineUpdate, opmode=0xc
> 11757196: engineUpdate, opmode=0xc
> 11757499: TXMODE, freq=907800000, len=23, SF=8, BW=500, CR=4/5, IH=0
> 12068031: RXMODE_SINGLE, freq=925100000, SF=7, BW=500, CR=4/5, IH=0
> 12129628: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 12139125: EV_JOIN_FAILED
> 12139157: engineUpdate, opmode=0xc
> 13027994: engineUpdate, opmode=0xc
> 13028297: TXMODE, freq=903900000, len=23, SF=10, BW=125, CR=4/5, IH=0
> 13358731: RXMODE_SINGLE, freq=923300000, SF=10, BW=500, CR=4/5, IH=0
> 13367039: EV_JOINED
> 13367070: engineUpdate, opmode=0x808
> 13367530: TXMODE, freq=902700000, len=26, SF=10, BW=125, CR=4/5, IH=0
> 13451741: RXMODE_SINGLE, freq=924500000, SF=10, BW=500, CR=4/5, IH=0
> 13514369: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 13518741: EV_TXCOMPLETE (includes waiting for RX windows)
> 13518789: engineUpdate, opmode=0x900
> 14768789: engineUpdate, opmode=0x908
> 14769249: TXMODE, freq=902900000, len=26, SF=10, BW=125, CR=4/5, IH=0
> Packet queued
> 14854741: RXMODE_SINGLE, freq=925100000, SF=10, BW=500, CR=4/5, IH=0
> 14917368: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 14921677: EV_TXCOMPLETE (includes waiting for RX windows)
> 14921724: engineUpdate, opmode=0x900
> 16171724: engineUpdate, opmode=0x908
> 16172183: TXMODE, freq=903100000, len=26, SF=10, BW=125, CR=4/5, IH=0
> Packet queued
> 16257739: RXMODE_SINGLE, freq=925700000, SF=10, BW=500, CR=4/5, IH=0
> 16320367: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 16324740: EV_TXCOMPLETE (includes waiting for RX windows)
> 16324787: engineUpdate, opmode=0x900
> 17574787: engineUpdate, opmode=0x908
> 17575247: TXMODE, freq=903300000, len=26, SF=10, BW=125, CR=4/5, IH=0
> Packet queued
> 17660801: RXMODE_SINGLE, freq=926300000, SF=10, BW=500, CR=4/5, IH=0
> 17723429: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 17727801: EV_TXCOMPLETE (includes waiting for RX windows)
> 17727849: engineUpdate, opmode=0x900
> 18977850: engineUpdate, opmode=0x908
> 18978310: TXMODE, freq=903500000, len=26, SF=10, BW=125, CR=4/5, IH=0
> Packet queued
> 19063866: RXMODE_SINGLE, freq=926900000, SF=10, BW=500, CR=4/5, IH=0
> 19126493: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 19130866: EV_TXCOMPLETE (includes waiting for RX windows)
> 19130914: engineUpdate, opmode=0x900
> 20380913: engineUpdate, opmode=0x908
> 20381373: TXMODE, freq=903700000, len=26, SF=10, BW=125, CR=4/5, IH=0
> Packet queued
> 20466928: RXMODE_SINGLE, freq=927500000, SF=10, BW=500, CR=4/5, IH=0
> 20529556: RXMODE_SINGLE, freq=923300000, SF=12, BW=500, CR=4/5, IH=0
> 20534003: EV_TXCOMPLETE (includes waiting for RX windows)
> 20534051: engineUpdate, opmode=0x900
> 21784050: engineUpdate, opmode=0x908
> 21784510: TXMODE, freq=903900000, len=26, SF=10, BW=125, CR=4/5, IH=0
> Packet queued
> 21870066: RXMODE_SINGLE, freq=923300000, SF=10, BW=500, CR=4/5, IH=0
> 21876412: Received downlink, window=RX1, port=-1, ack=0
> 21876459: EV_TXCOMPLETE (includes waiting for RX windows)
> 21879674: engineUpdate, opmode=0x800
> 23129674: engineUpdate, opmode=0x808
> 23130134: TXMODE, freq=904100000, len=28, SF=8, BW=125, CR=4/5, IH=0
> Packet queued
> 23197543: RXMODE_SINGLE, freq=923900000, SF=8, BW=500, CR=4/5, IH=0
> 23199491: Received downlink, window=RX1, port=-1, ack=1
> 23201195: EV_TXCOMPLETE (includes waiting for RX windows)
> 23205032: engineUpdate, opmode=0x800
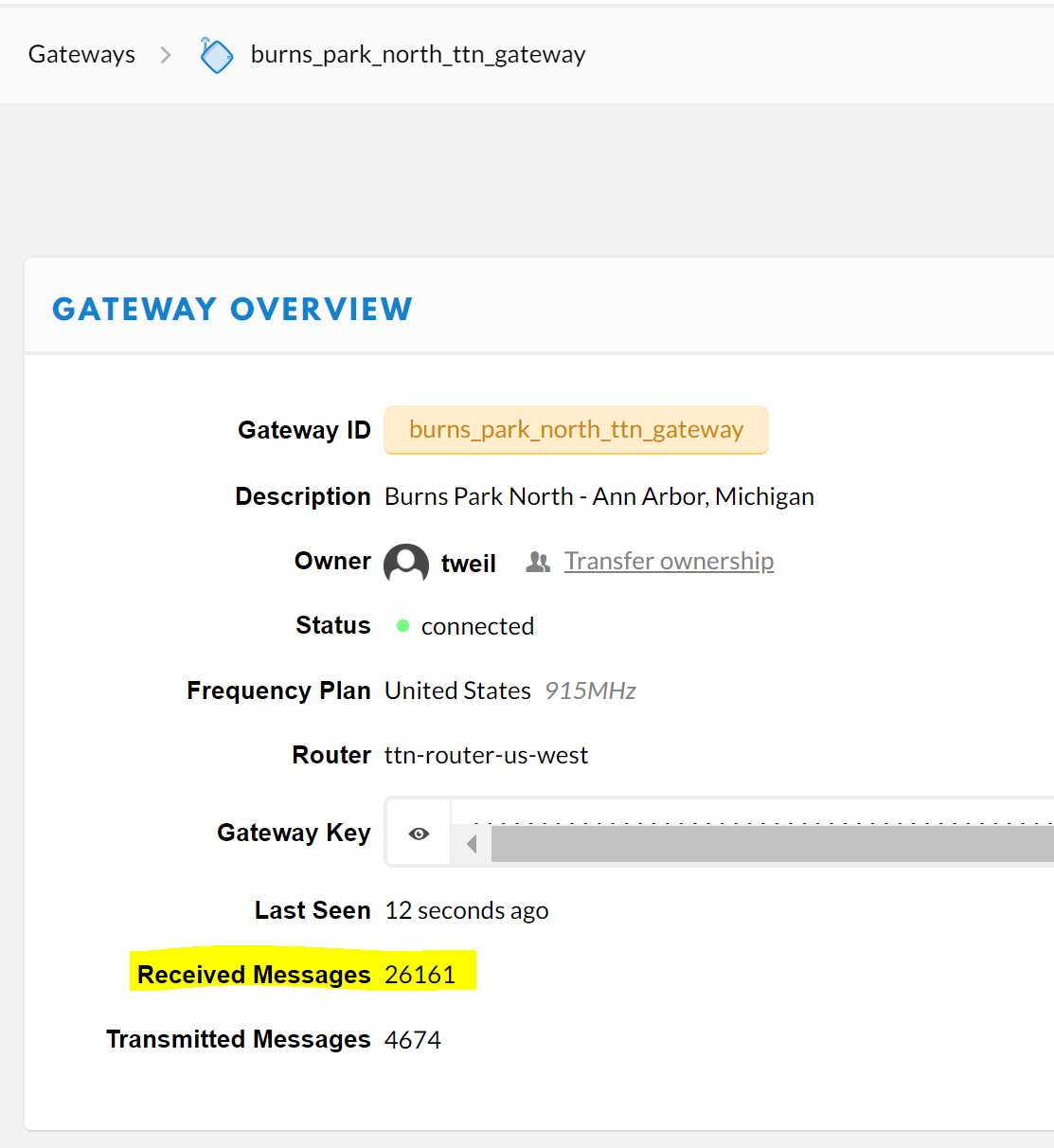
The Console Gateway Overview in the received messages counter does NOT increment between the Moteino’s JOIN REQUEST and sending the ‘first’ uplink message
Gateway Overview Before JOIN REQUEST and Before any frames appear in Gateway Traffic or Application Data. Received Messages: 26161
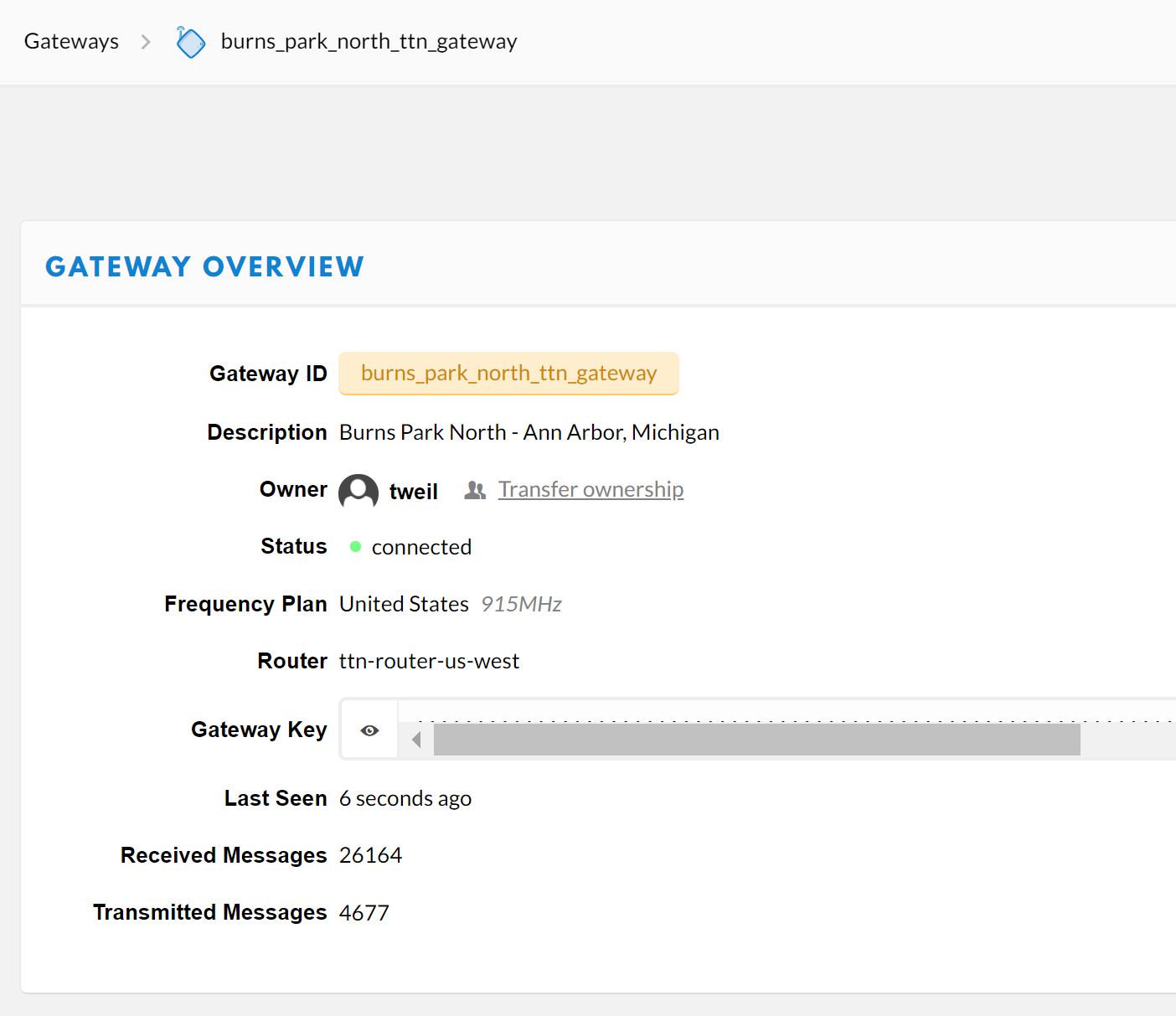
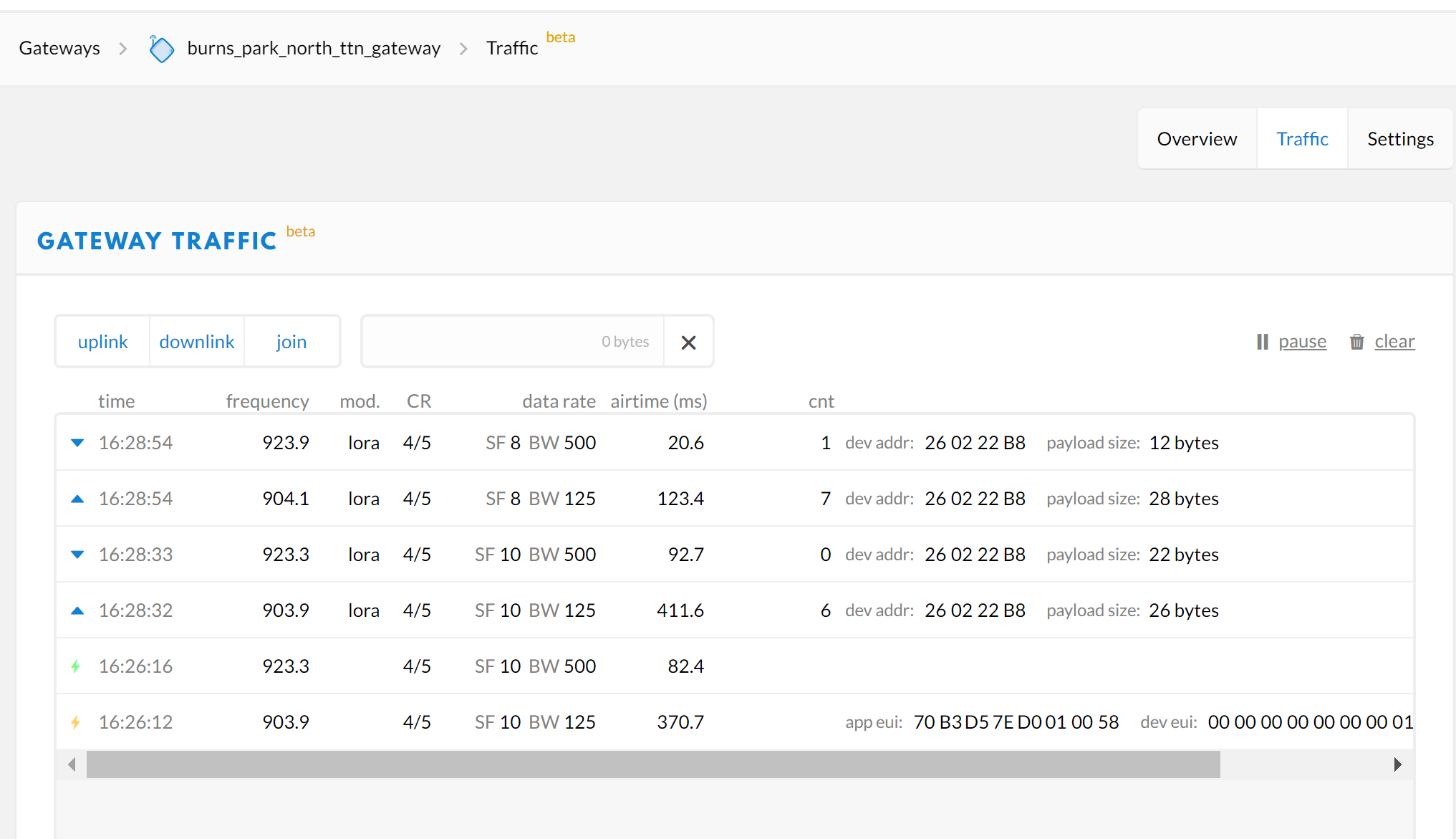
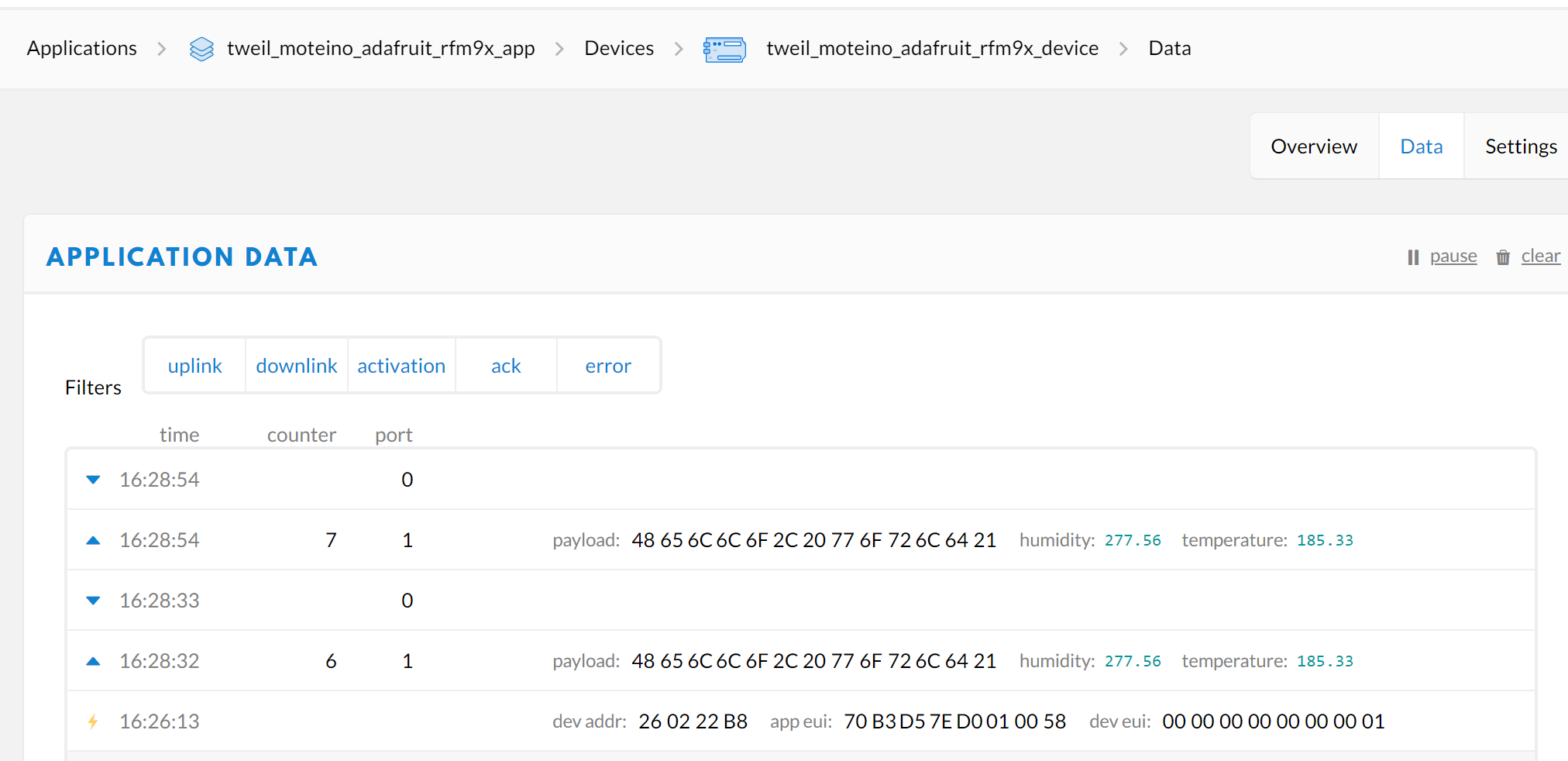
Gateway Overview shows Received messages increased 3 after JOIN REQUEST and 2 successful frames (frames 6 and 7) appear in Gateway Traffic and Application Data. Received Messages: 26164
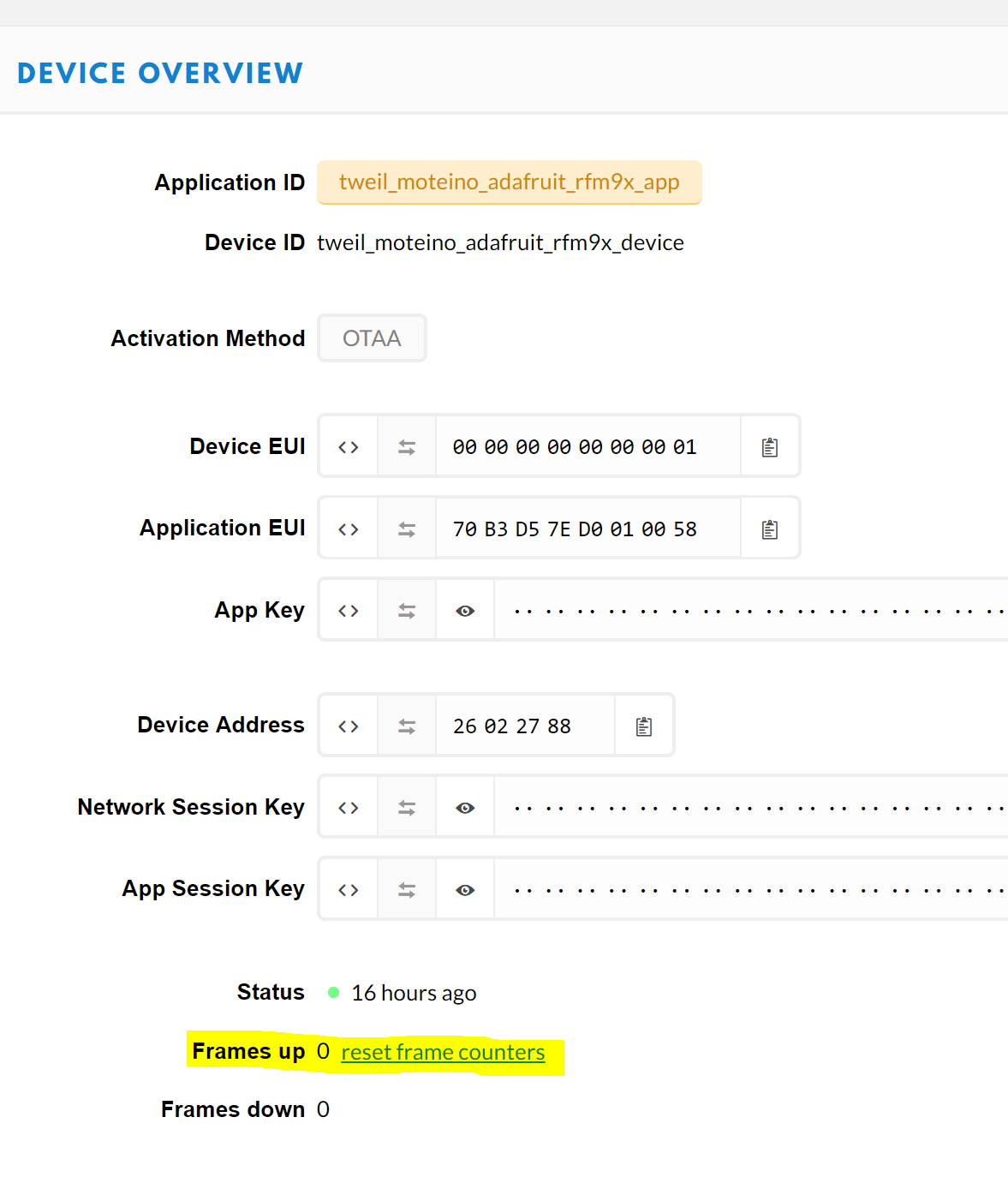
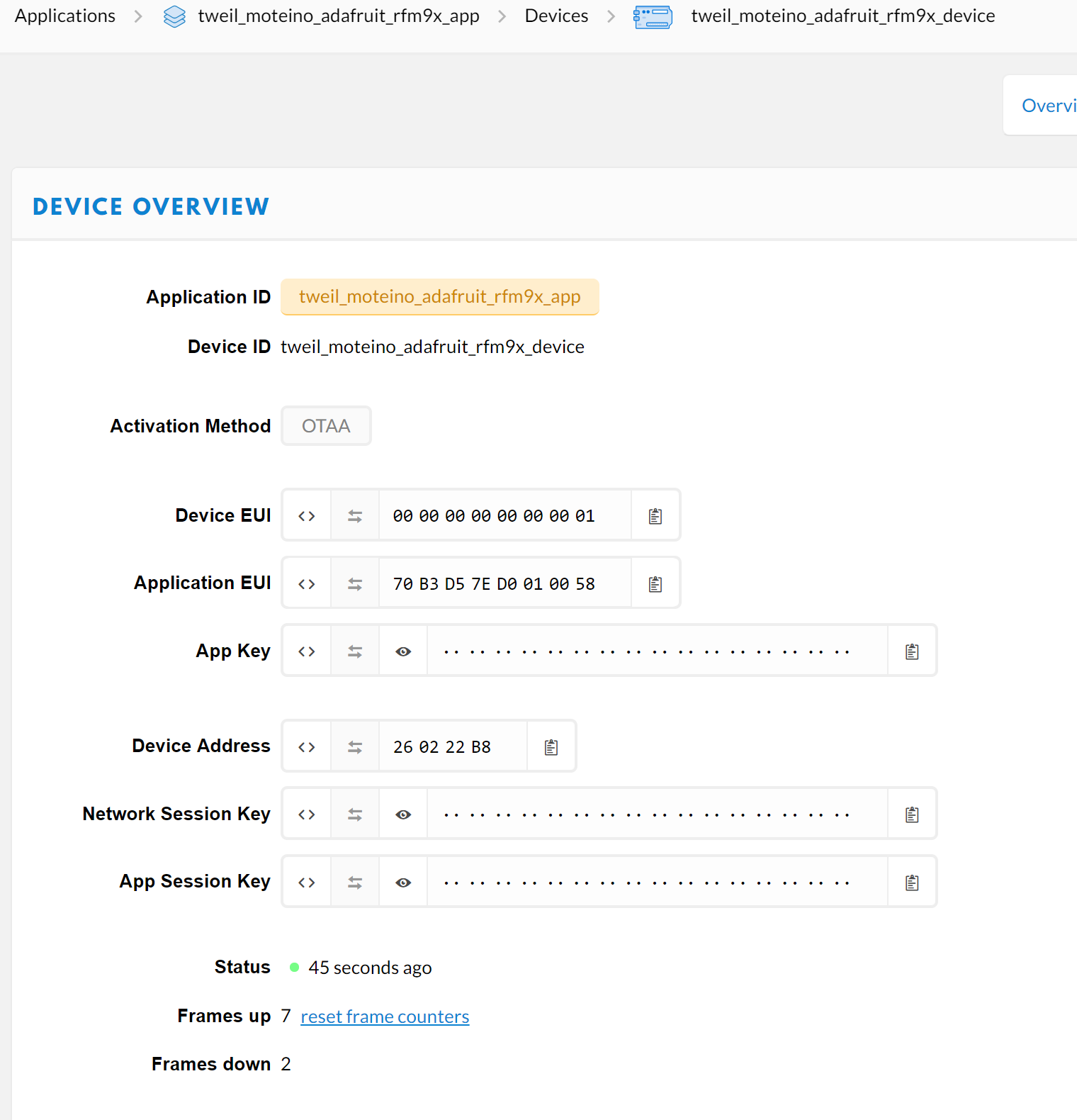
Console Device Overview before JOIN REQUEST and while waiting for Frames to populate Application Data: Frames Up/Down: 0
Console Device Overview after JOIN Accept and 7 frames received (counter 6 and 7)