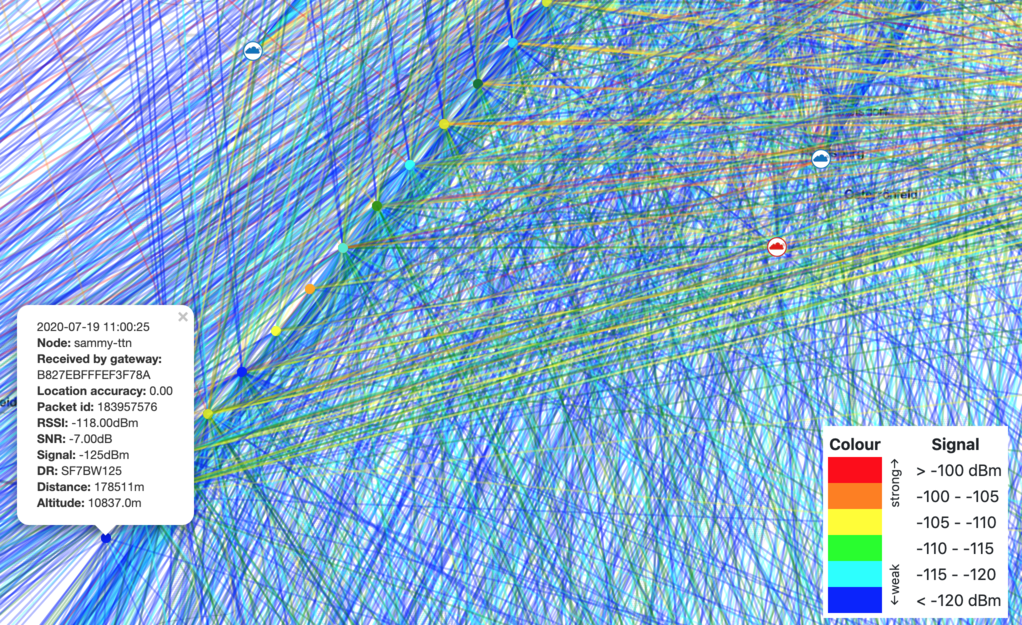
That was me, flying the sammy-ttn high altitude balloon. It was never my intention to spam the TTNMapper database. I apologize if I messed up other experiments. That was not my intention. If the data can be deleted, please go ahead.
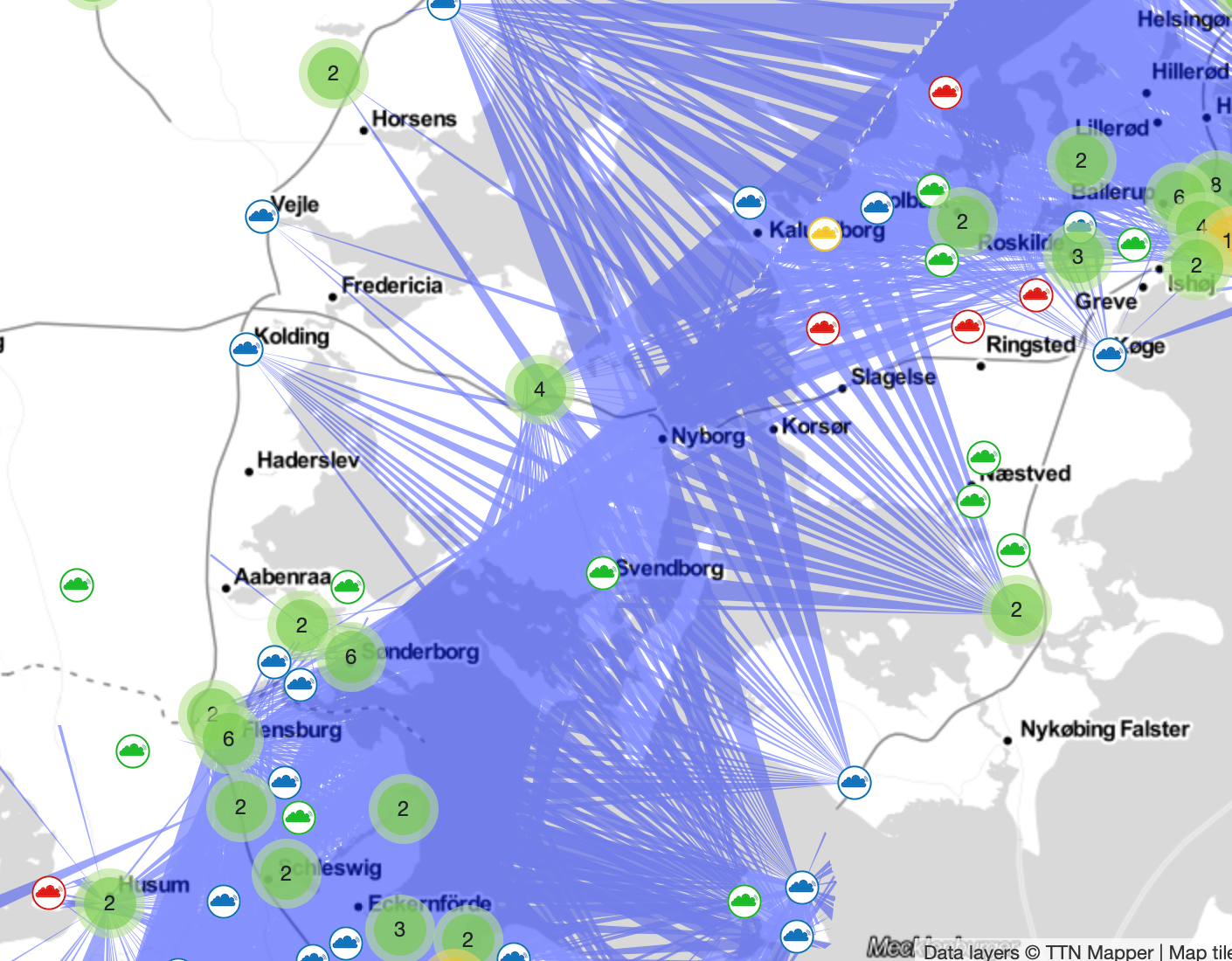
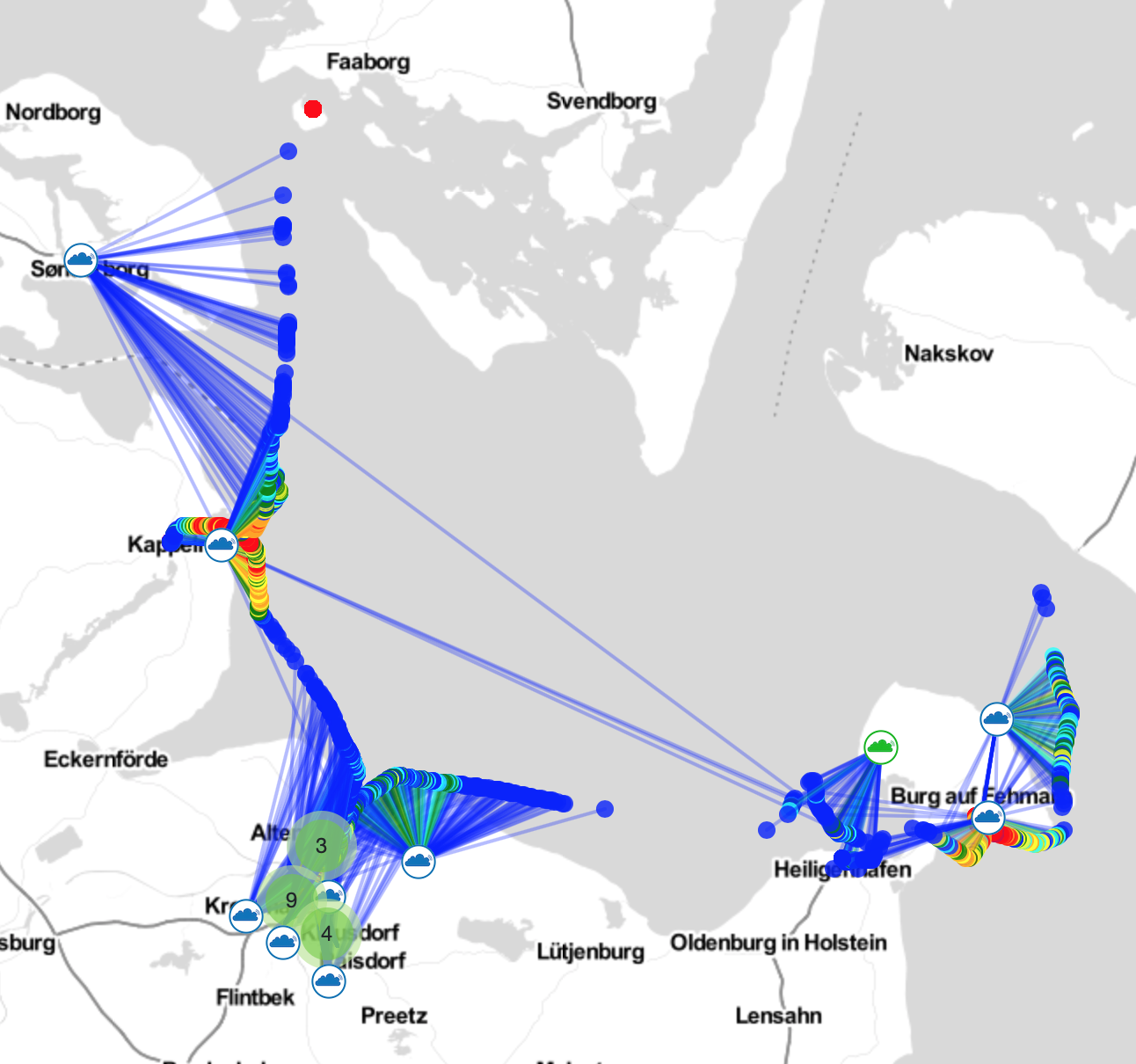
The device is a 20gr balloon that was launched in The Netherlands, flew north, across Europe, Sweden and then made a wide turn down to Kazachstan where it found a “lost” EU frequency gateway. I will break the connection to TTNMapper so other experiments won’t be disturbed when more data from the balloon comes in.
I am not very experienced with LoRaWan. I have flown multiple LoRa balloons but this was only my second LoRaWan balloon. I have to say that I am very impressed with how wonderful this protocol works and how well the coverage is in Europe. The balloon was tracked very well. Thanks for sharing time and knowledge in this forum.
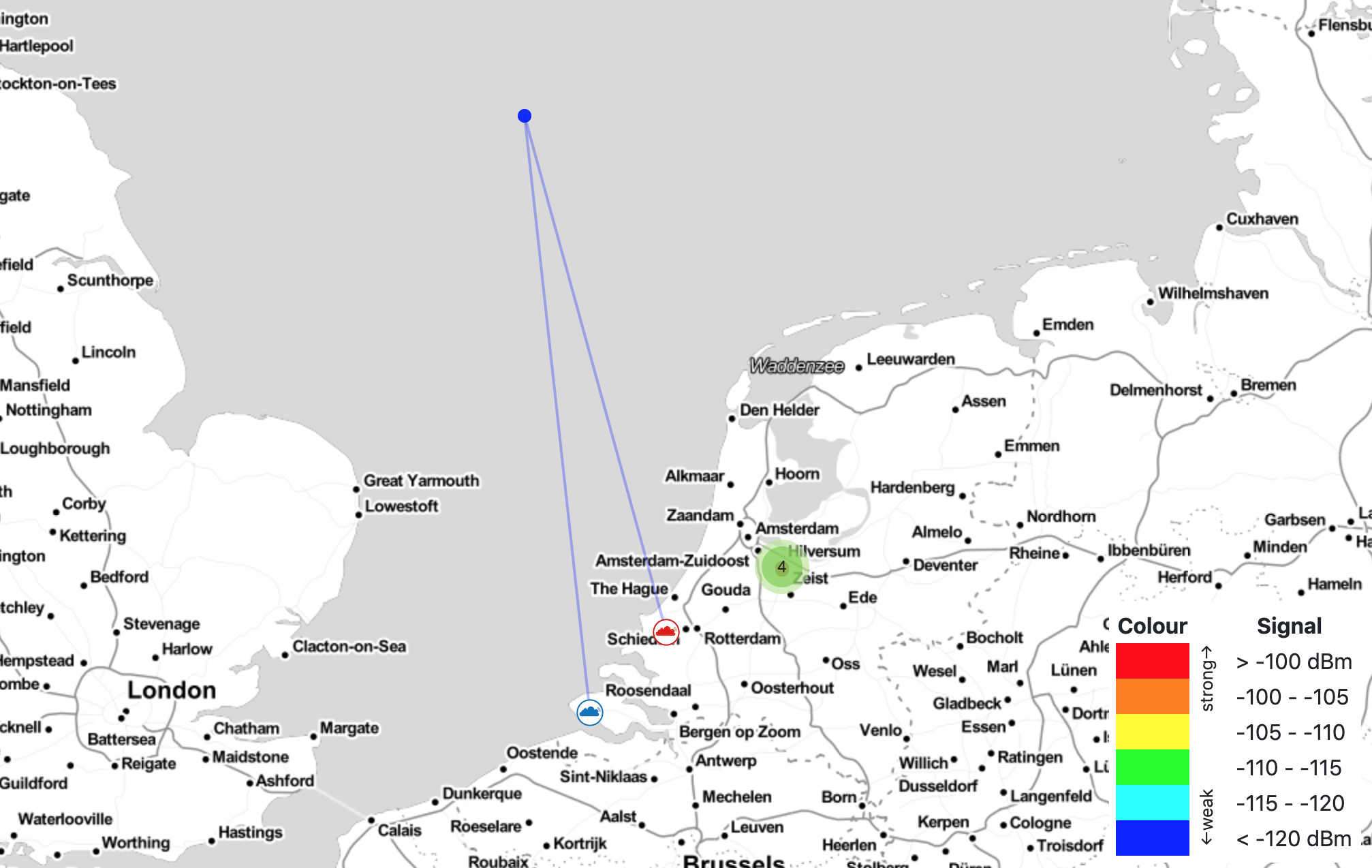
Since reception at altitude (from a balloon) might be up to 800km, it could be an idea to restrict the power level of the transmissions so most of Europe does not pick them up.
There is no need to break the link with TTN mapper. If you add an experiment name to the TTN mapper integration you put your data in a separate part of TTN mapper, your data is saved and new data is no longer cluttering the main application of TTN mapper.
Now you can continue your experiment!
Can you share some more info like pictures and circuits and want you learned? We enjoy your experiment than even better. Thanks!
As promised some more info about the node that spammed the TTNMapper.
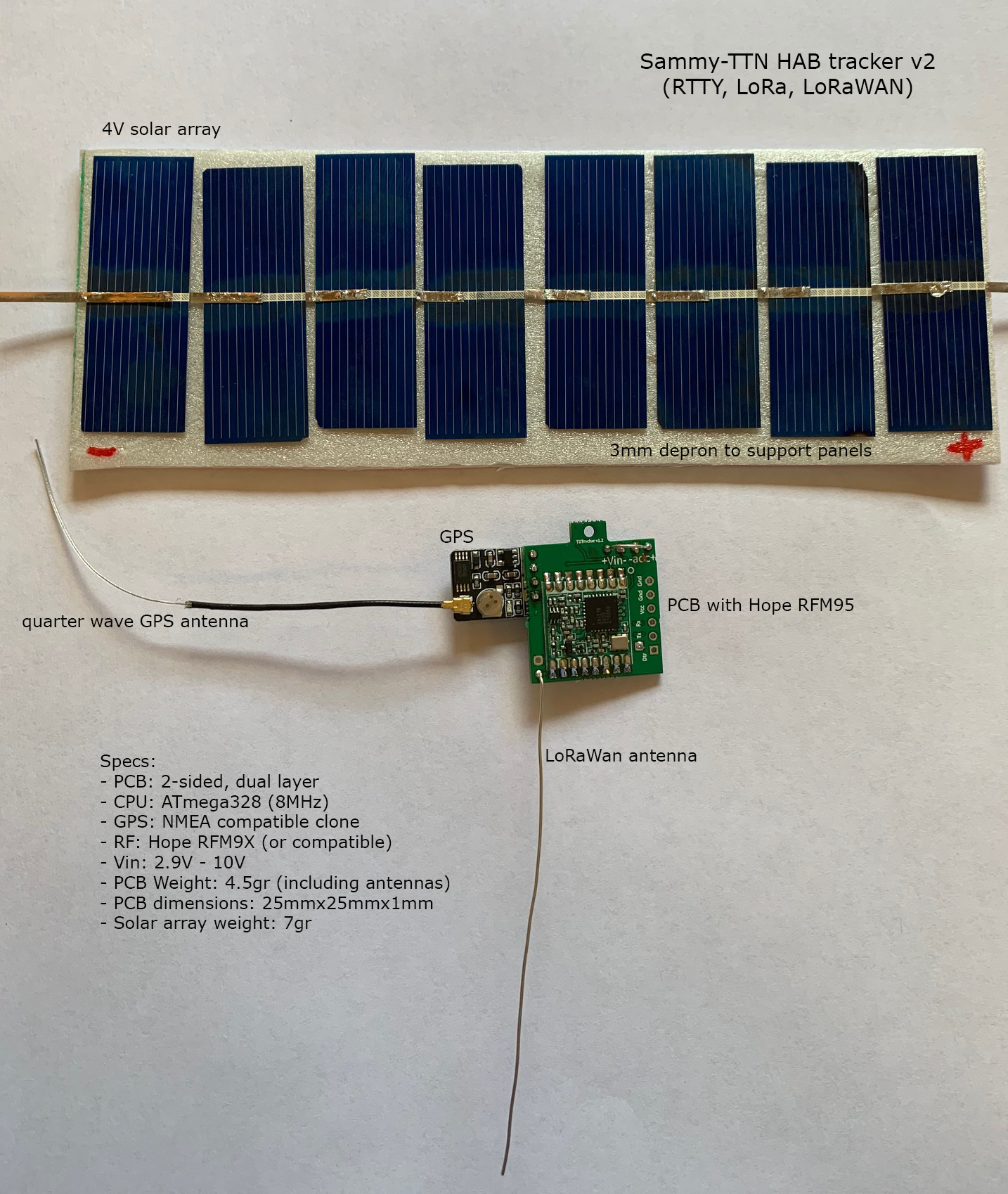
It is basically a stripped down Arduino Pro Mini with a GPS and RF chip.I designed the PCB with the free Easyeda software and had it made in China. Most components are SMD 0805, small enough to save weight but big enough to solder by hand. It is powered by 8 small solar cells in series.
I made the software using the RadioLib and Lmic libraries (available on GitHub) for the RF part. The node can do RTTY, LoRa and LoRaWAN.
It is however still a deaf device. It cannot not receive and it still needs many enhancements like geofencing and variable TX intervals. RF output power was set to 10mw.
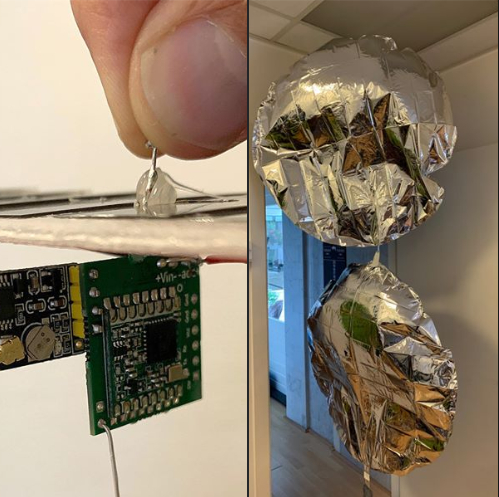
For this flight it had two 36 inch common foil party balloons. The balloons were taped to eachother using duct tape. The most difficult part of the flight is filling the balloons. They need to behave like a single superpressure balloon. Too much Helium and they will burst. The free neck lift for the whole package was 4gr.
The data contains GPS coordinates, solar voltage and some more info. That data is coded into the Cayenne format and sent every tow minutes to the LoRaWAN gateways.
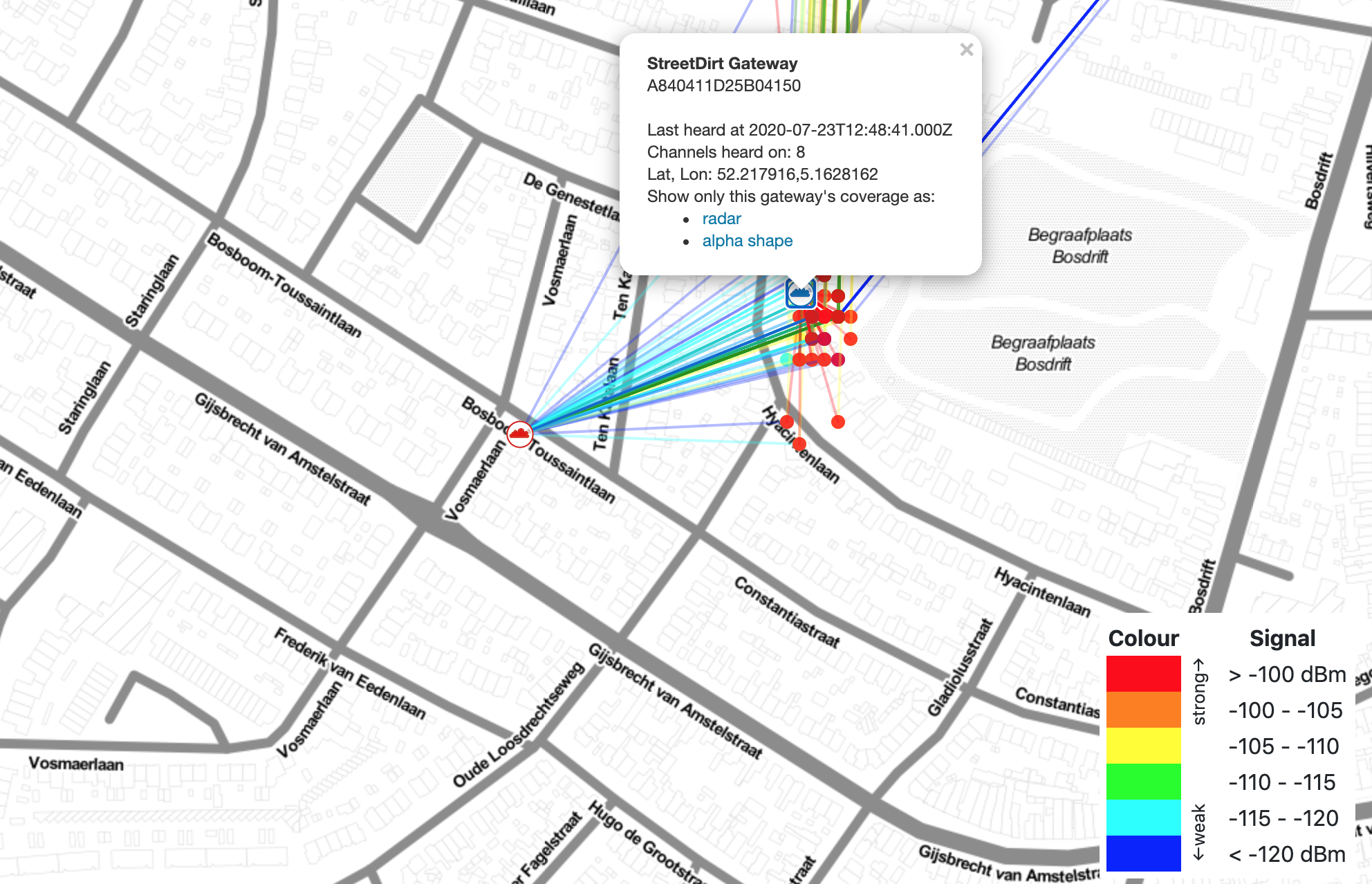
When the data arrives at TTN, it is picked up by a script made by Bertrik Sikken and sent to the tracker.habhub.org website where the data is stored and the position of the balloon is visible on a world map in realtime.
Goal of the experiment was to find out if it is possible to track a free balloon fully automatically across Europe with LoRaWAN and TTN. Results were very good. And thanks to the TTN integrations it is possible to obtain even more knowledge from the data.
Most of what I know about high altitude ballons, I learned from the UKHAS Google Group and the HAB-NL (in Dutch) Facebook group. The people running these groups are the best. Supportive and extremely knowledgeable. If you want to know more, I highly recommend those two groups.
Thanks for sharing!
Btw, did you make more of the PCBs ? (if so, any thoughts of selling any ?)
Seems like a good low power solution, and apparently the Hope RFM works well!
 Now it’s all hidden under the mapping done by air.
Now it’s all hidden under the mapping done by air.