Easy and well working.
Tried on ESP32 Espressif DevKit v1 and ESP32 Wroom32 module
Easy to set and to use. The only needed adaptation is the pinout which depends on the used board.
Not clear what the max possible power is.
Looks to be 14dBm “only”
MCCI LoRaWAN LMIC library v4.0.0 has been released.
If the LMIC-node application is already cloned/installed onto your system and you want to use the latest LMIC library version, you can update the LMIC library in your LMIC-node project by running the PlatformIO command:
pio lib update
This will update all libraries in the project that were previously downloaded (based on lib_deps in platformio.ini). Without a manual lib update PlatformIO will keep using the previously downloaded libraries (which may not be the latest versions).
If a library was not previously downloaded, the latest version will be downloaded.
(PlatformIO downloads libraries separately for each board.)
Espressif8266 platform version 3.0.0 causes an issue in LMIC-node for the NodeMCU V2 (ESP8266) board. If you run into this problem, to fix just update to the latest LMIC-node version on Github.
In PlatformIO installed platforms (e.g. ESP32, STM32, SAMD, ESP8266) are not automatically updated. Updating a platform can be done from the PlatformIO IDE Home/Platforms/Update page or with PlatformIO command pio update. Latter will update all platforms at once.
Updating a platform normally does not cause issues. However, the new espressif8266 platform version 3.0.0 does cause an issue for the NodeMCU V2 (ESP8266) board for LMIC debugging (LMIC_PRINTF_TO). This manifests as compilation error "cookie_io_functions_t does not name a type". This has been fixed (i.e. support for espressif8266 v3.0.0 has been added) in the latest version of LMIC-node.
A decent README.md was already included with LMIC-node so you won’t have to write it from scratch.
The README.md is the first thing people will see on the repository home page.
At minimum it should be updated to reflect the name of your repository.
Requiring users to dive into the code first to find out if it provides the functionality they are looking for and if they can use it for their board and GPS module is not user friendly and time consuming. Some documentation will therefore be appreciated.
Adding the documentation in a separate file (e.g. GPS.md) will make it easier to sync with future LMIC-node updates.
Things that will be useful to document:
What functionality is added and/or changed in your code?
What makes your repository different from LMIC-node?
Which GPS module(s) and which board(s) are supported by the added GPS code?
A description of added functionality and how people can use it.
With which GPS module and board was it tested?
Any known limitations.
(Don’t forget to also update the repository description aka ‘About’).
In a future update LMIC-node program documentation will be moved from README.md to a separate file. That will make it easier to update the README.md for repository forks.
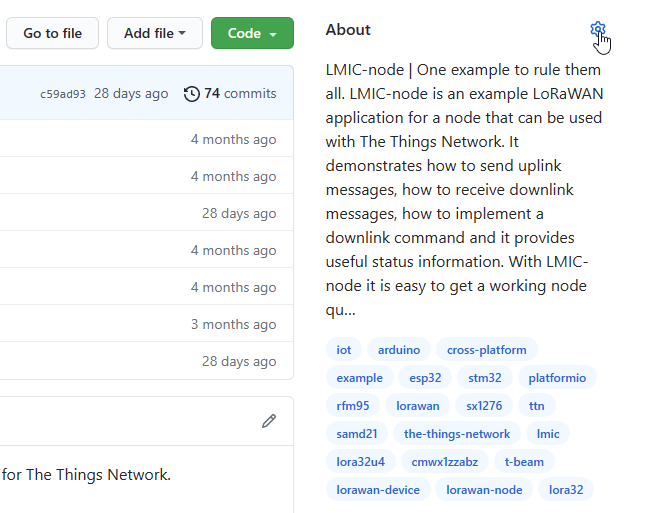
On the repository home page top-right select the settings icon:
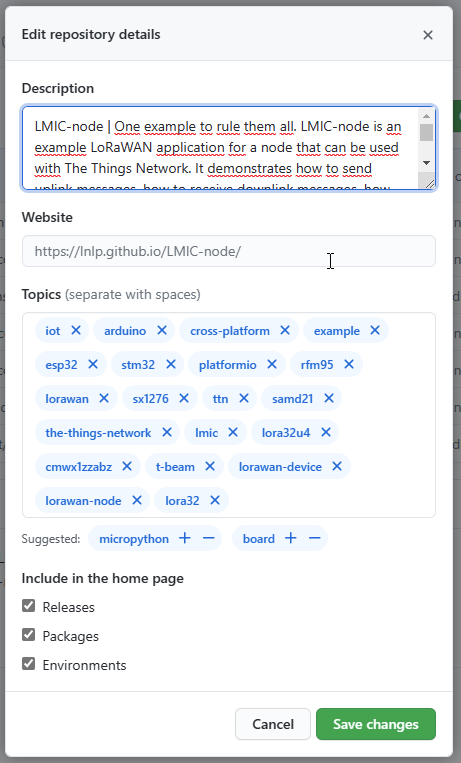
You can then edit/update the description:
It will also be useful to add “GPS” as keyword (‘topic’). LMIC-node already has the maximum number of 20 topics defined so you will need to remove one of the existing topics first (I suggest to remove cmwx1zzabz).
The description (‘about’) and keywords (‘topics’) are used by search engines (including GitHub search) for finding relevant matches.